Device Functions
SIRIUS 3RW44 System Manual
6-16 GWA 4NEB 535 2195-02 DS 04
6.4 Slow Speed Function
This function allows an asynchronous motor to be temporarily operated in both
directions at a rotational speed that is lower than the rated rotational speed.
The rated rotational speed n
motor
of the motor is determined by its line frequency
(f) and its number of pole pairs (p).
A resulting slow speed frequency for the motor is defined by a specific thyristor
control. However, this function requires that only a reduced torque can be
generated in the motor. Due to possible overheating of the motor, this function is
not suitable for continuous operation.
The slow speed factor and the slow torque can be entered individually for both
directions of rotation.
Slow speed factor By adjusting the slow speed factor, it is possible to control the motor with a
rotational speed (n
Slow speed
) that is lower than the rated rotational speed either
in the same or opposite direction of rotation to that of the line.
Slow torque The torque generated in the motor can be influenced using the slow torque. The
maximum torque which can be created depends on the slow torque that is
specified. 100 % slow torque can correspond to approx 30 % of the motor rated
torque.
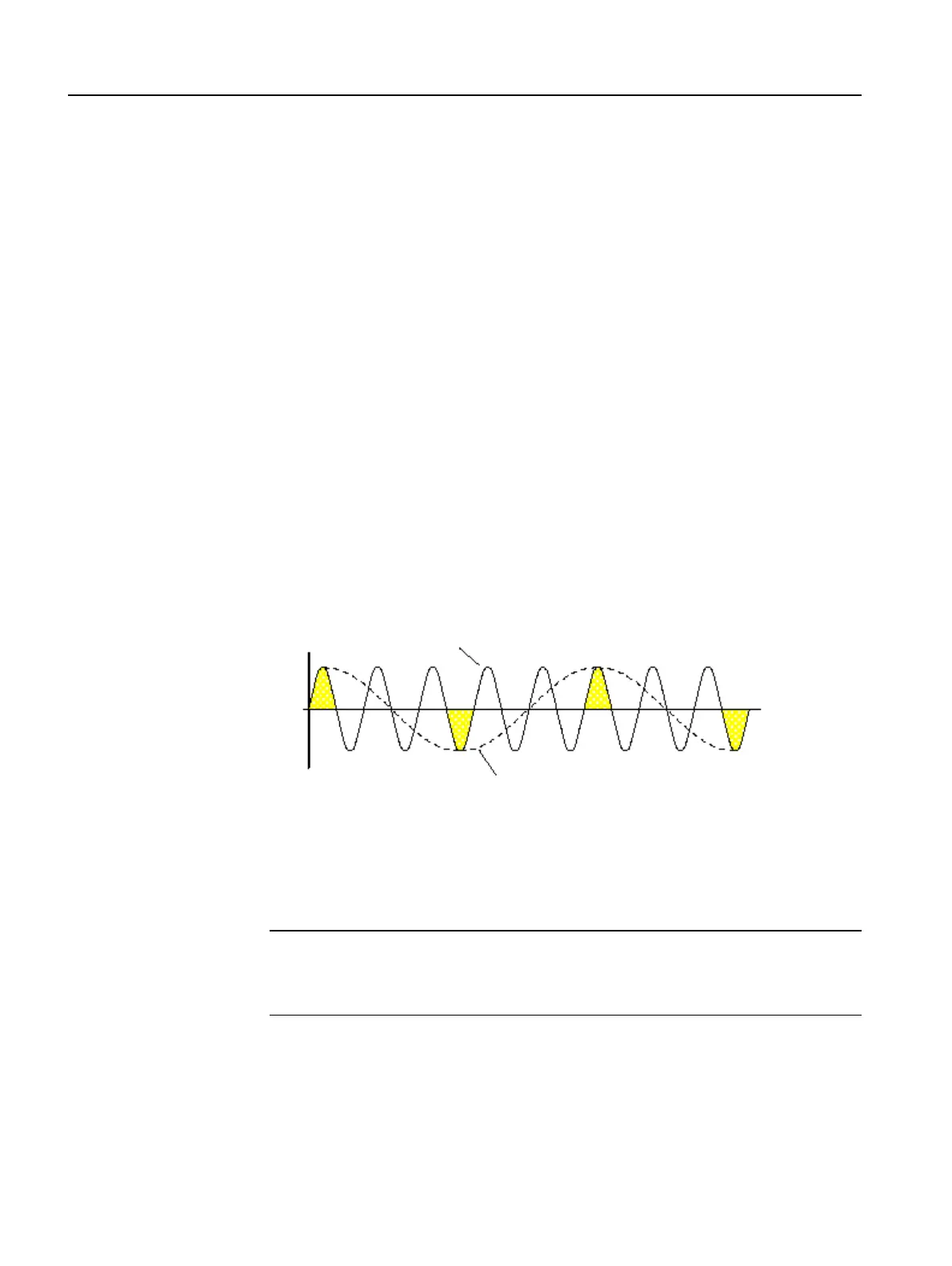
Figure 6-10:Slow speed function
Typical applications for slow speed function
This function is suitable for applications with a low counter torque, e.g. when
machine tools are positioned.
Note
In addition to the set parameters, the motor-specific properties and the
connected load also affect the rotational speed resulting from the slow speed
function and the slow torque generated in the motor.
n
Motor
f
60
p
----- -
×=
n
Slow speed
n
Rated
Slow speed factor
-----------------------------------------------=
Line frequency
Resulting "slow speed frequency"

 Loading...
Loading...










