Operation
20221032B 29
2.7 Thruster Steering
If the vessel is equipped with a thruster, it can be connected to
the AP50 system and the vessel can then be controlled by
rudder, thruster, or both rudder and thruster.
After connecting a thruster to the autopilot system (see the TI50
manual) the thruster type must be selected under the Installation
Dockside menu (see page 126).
A thruster icon below the mode index indicates that a thruster is
connected to the system.
Now you can select one of three control functions from the User
Set-up Menu:
• Rudder: The rudder is used to maintain the heading (always
in AUTO mode and NAV mode).
• Thruster: The thruster is used to maintain the heading (only
in AUTO-WORK, NAV-WORK, Follow-up, and Non-
Follow-up steering modes).
• Rudder and Thruster: Both rudder and thruster are used to
maintain the heading (only in AUTO-WORK mode, NAV-
WORK mode, Follow-up and Non-Follow-up steering
modes).
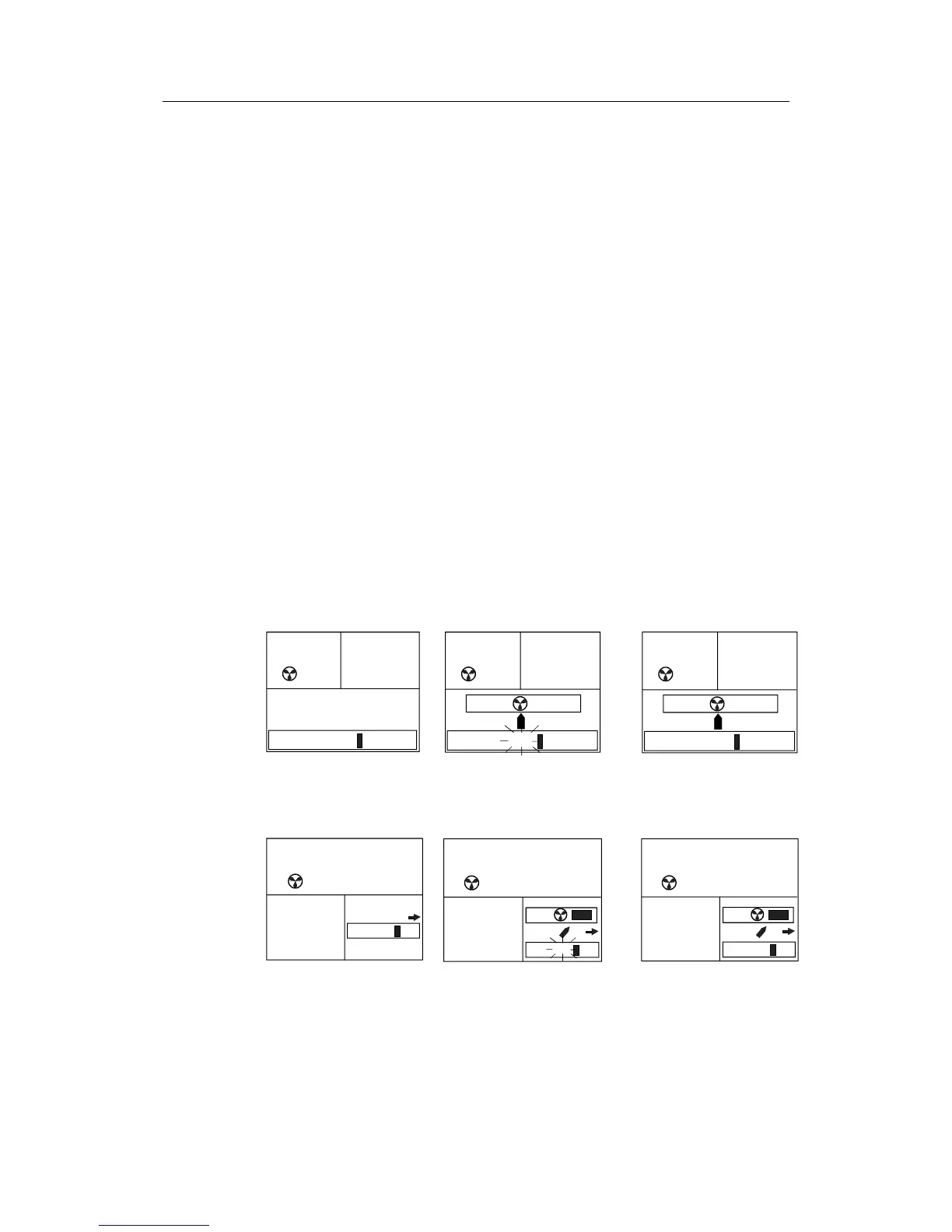
Examples of display pictures:
STANDBY
mode
(Follow-up
and Non-
follow up
steering
modes)
02
340.
7
Gyro1
S
TBY
RUDDER
Heading to be
maintained by rudder
02
340.
7
Gyro1
S
TBY
Heading to be maintained
by thruster
02
340.
7
Gyro1
S
TBY
Heading to be maintained
by rudder and thruster
AUTO-
WORK
mode
271
02
RUDDER
A
w
263.
7
Gyro1
271
A
w
263.
7
Gyro1
02
271
A
w
263.
7
Gyro1
02
Heading maintained
by rudder
Heading maintained by
thruster
Heading maintained by
rudder and thruster