Simrad GC80/GC85 Dual Gyro Compass
72 20221537 / D
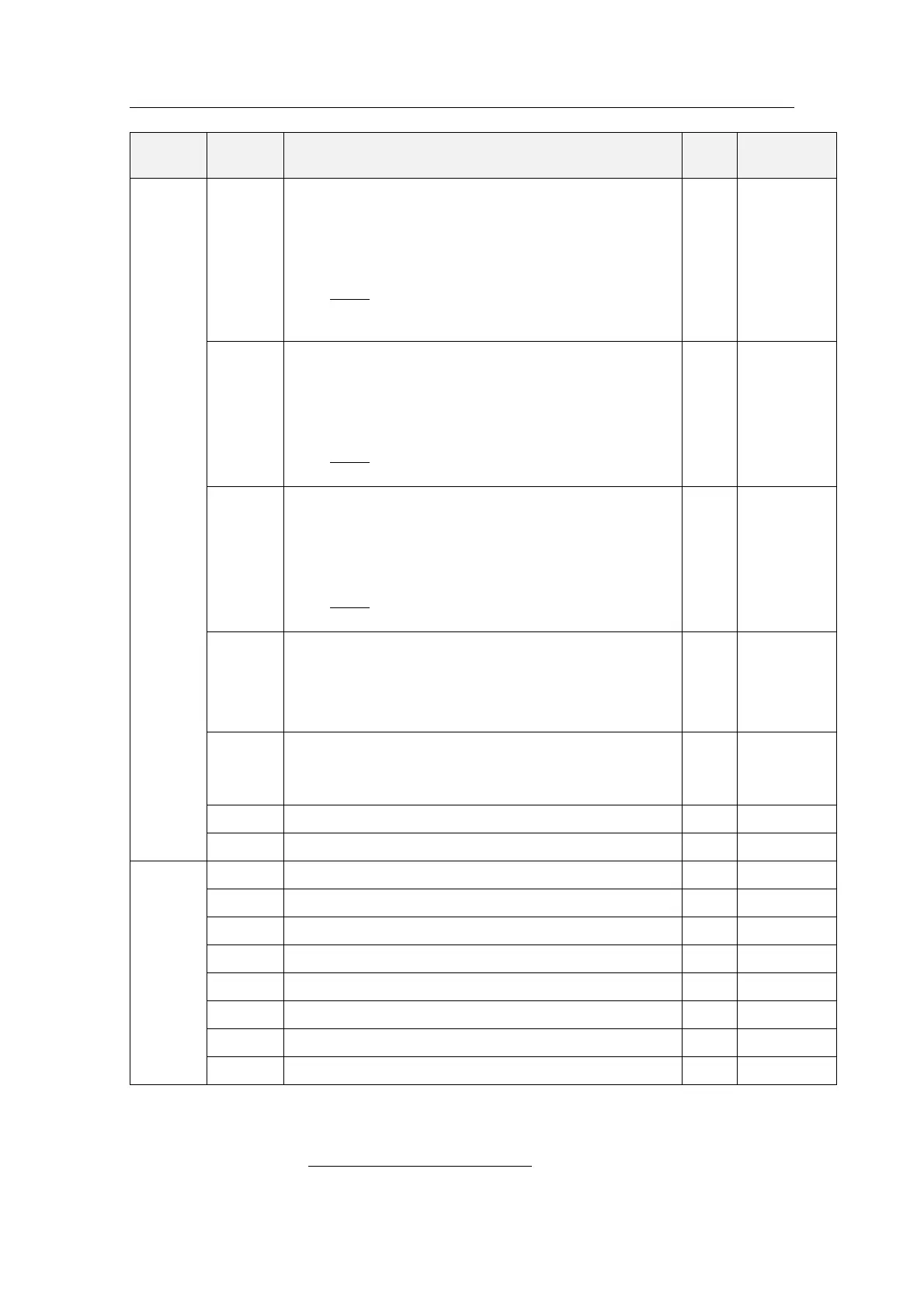
Main
Category
Sub
Category
Parameter/description
Default
value
Range
A-2 cont.
2.9.G Display/setting of GPS connection
The following abbreviations are used:
bE: GPS connected
Non: No GPS connected
NOTE
: When this value is set to “Non”, GPS can not
be selected as the vessel’s input for speed and
latitude.
- bE or Non
2.A.L Display/setting of LOG connection
The following abbreviations are used:
bE: with Log (contact)
Non: No Log (contact)
NOTE
: When this value is set to “Non”, LOG can not
be selected as the vessel’s speed input.
- bE or Non
2.b.S Display/setting of LOG (serial) connection
The following abbreviations are used:
bE: with Log (serial)
Non: No Log (serial)
NOTE
: When this value is set to “Non”, SLOG can not
be selected as the vessel’s speed input.
- bE or Non
2.c.t Display/setting of GPS performance index data check
The following abbreviations are used:
bE: Check performance index
Non: Not check performance index
- bE or Non
2.d.o Analogue signal output offset for ROT (°)
Offset value for analogue signal output of Rate Of
Turn. Entered value is +/-5% of maximum output ROT.
0.00 0.0 – 16
2
2.e.F Filter time constant for rate of turn (sec) 2.00 0.5 – 10.0
2.F.G Analog output gain for rate of turn 1.00 0.90 – 1.00
3.1.E Alarm (error) - -
3.2.n Occurred number of zero-cross error - -
3.3.H Maximum zero-cross error - -
3.4.y Occurred year of zero-cross error - -
3.5.N Occurred month/day of zero-cross error - -
3.6.t Occurred hour/minute of zero-cross error - -
3.7.n Occurred number of encoder error - -
A-3
3.8.r Occurred number of reset with WATCH DOC TIMER - -
2
The maximum value is 5% of the maximum analog output for rate of turn.(32 deg./min: 1.6deg./min.,
130deg./min: 6.5deg./min., 320deg./min: 16.0deg./min.)