2.6 Movement Without Drive Power
Do not attempt to move the RO1 robot without drive power unless instructed by Standard Bots person-
nel, otherwise damage could occur.
The RO1 is a collaborative robot, and is designed to work in environments alongside humans. As such,
under normal circumstances moving the robot without drive power is not required. Should the robot
position need to be changed, simply use pendant to jog the robot into the required position.
Should you be instructed to move the robot without drive power by Standard Bots personnel, the below
procedure can be used on each joint individually to adjust the robot position:
1. Unplug the robot.
2. Remove the cover on either Joint 0 or Joint 1 (bottom 2 joints, shown in attached image) by twisting
it o.
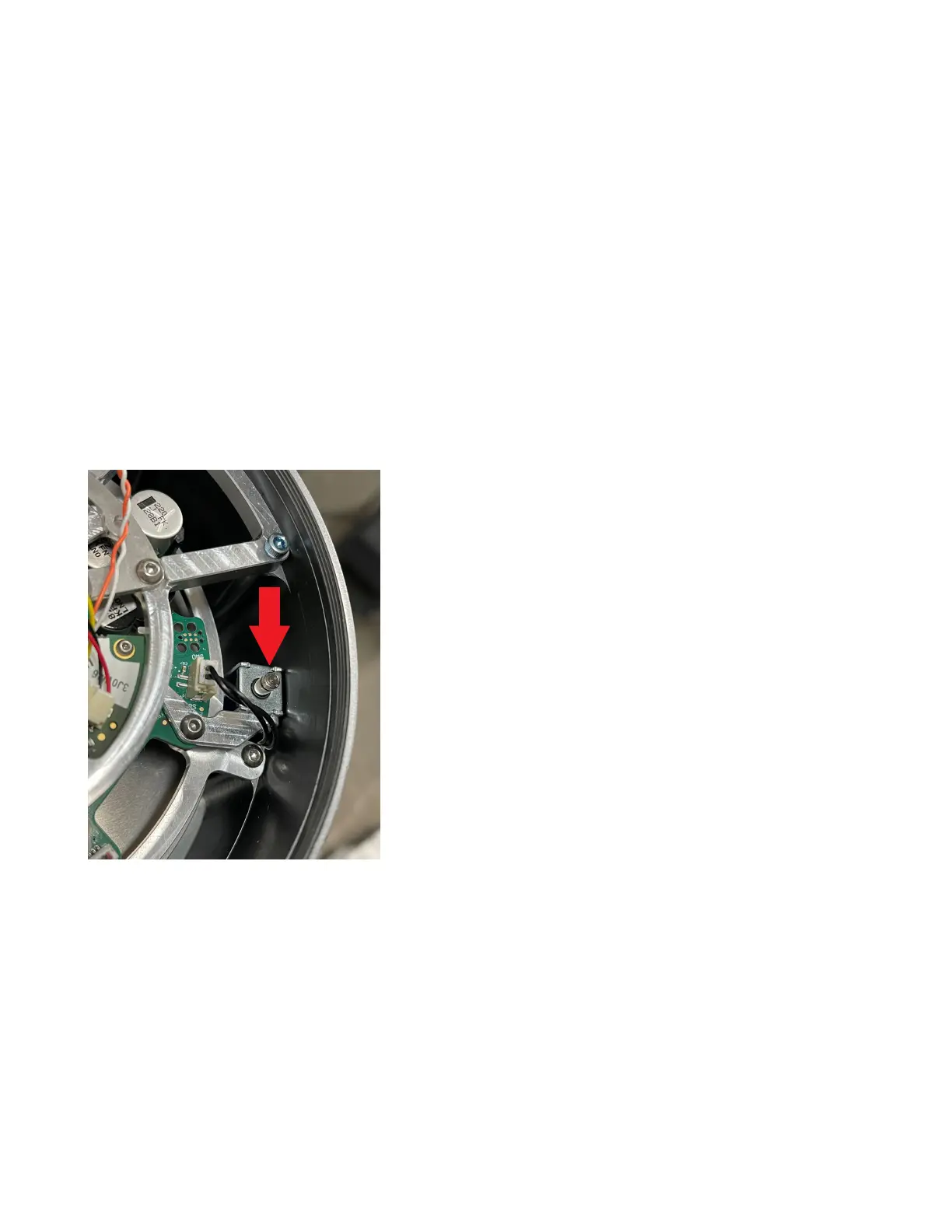
3. Press the brake release button (shown in below image) and hold down while moving joint.
4. Move the robot away from the collision a short distance.
5. Release brake button.
6. Replace joint cap.
7. Plug the robot back in.
8. Conrm proper robot operation.
17