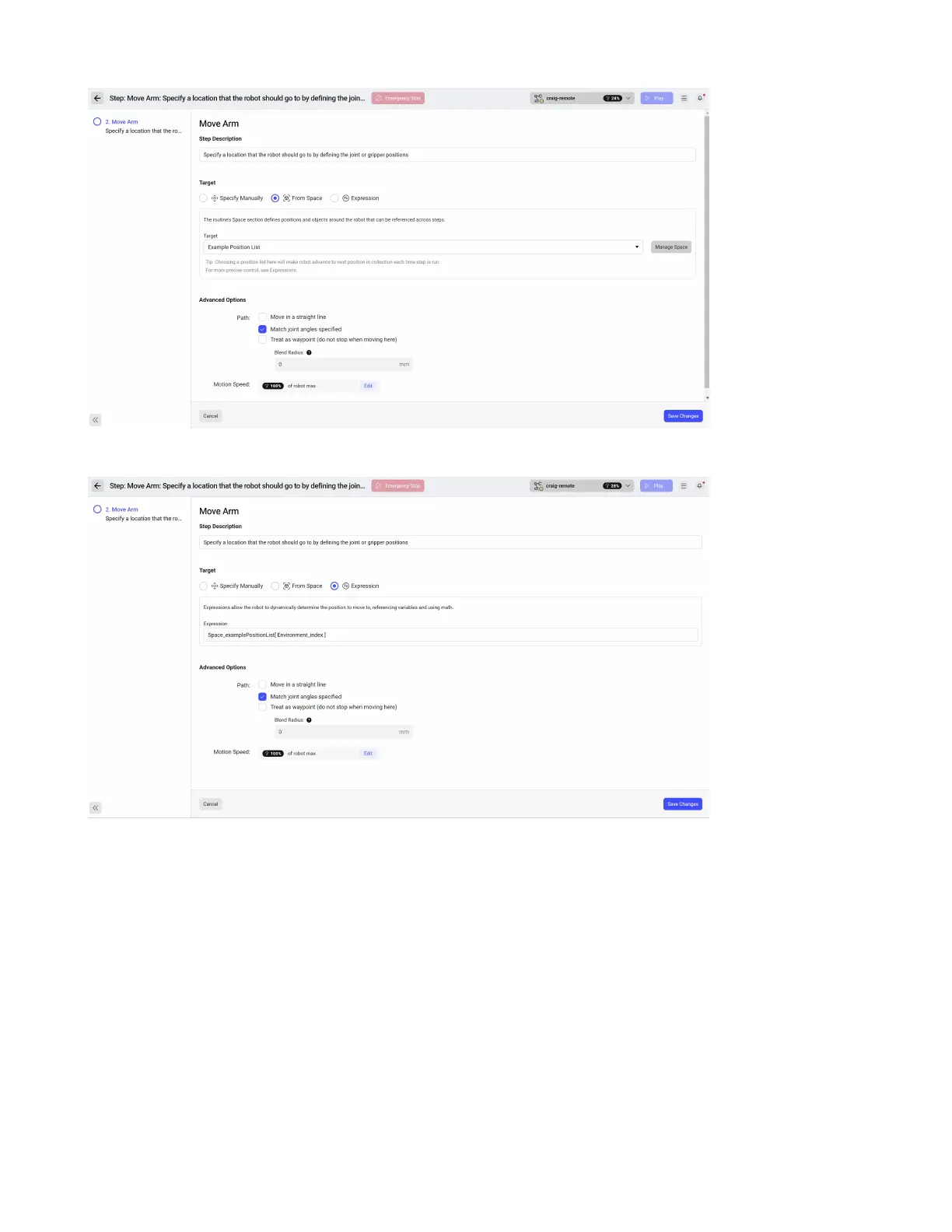
To go to the positions in order, use a Move Arm command and select the list from the Space.
To access positions in the list not in order, use the “Expressions” option as shown. In this example we
are going to the position in the list based o the environmental variable “index”.
/pagebreak
5.7.5 Haas Ethernet Integration
Introduction
For Haas machines that support Next Generation control (generally 2017 or newer machines) Standard
Bots provides a rst-class integration suite that allows for ethernet communication between the Stan-
dard Bots robot and Haas machine. This allows for quicker setup and more flexibility with less wiring.
Standard Bots provides a set of sample .nc les to get started with an ethernet Haas integration. The
81