3.7 Connecting End Eectors
3.7.1 Mechanical Connection
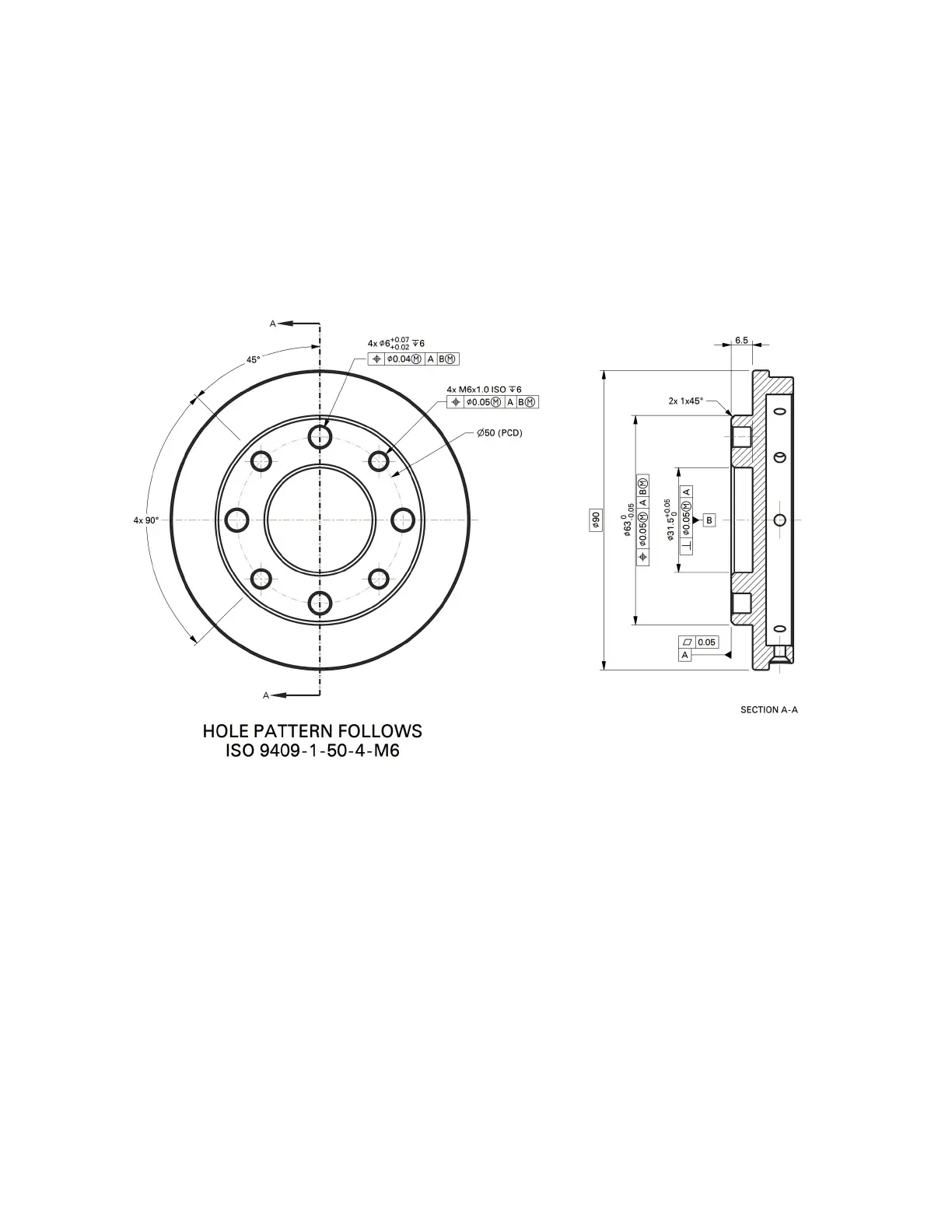
The RO1 robot uses a modied version of the standard ISO 9409-1-50-4-M6 50 mm ISO robot flange
pattern. The RO1 oers four locations for the locating pin, where the ISO 9409-1-50-4-M6 standard
oers 1 pin location. Any tool that follows the standard 50mm pattern will mount to the RO1 robot
flange. A diagram of the mounting pattern is shown below.
3.7.2 Fully Integrated Tools
Standard Bots supports full integration with the following tools. These tools can be fully controlled
using standard instructions in the Standard Bots Routine Editor.
• OnRobot 2FG7
• OnRobot 3FG15
• OnRobot Screwdriver
• OnRobot Dual Quick Changer
• OnRobot VGP20
Follow the instructions provided with the tooling to connect the tooling to the robot flange, and connect
the wire to the provided connector at the end of the robot arm.
25