STOBER 10 | Looking for more information about EtherCAT?
02/2020 | ID 442516.07
61
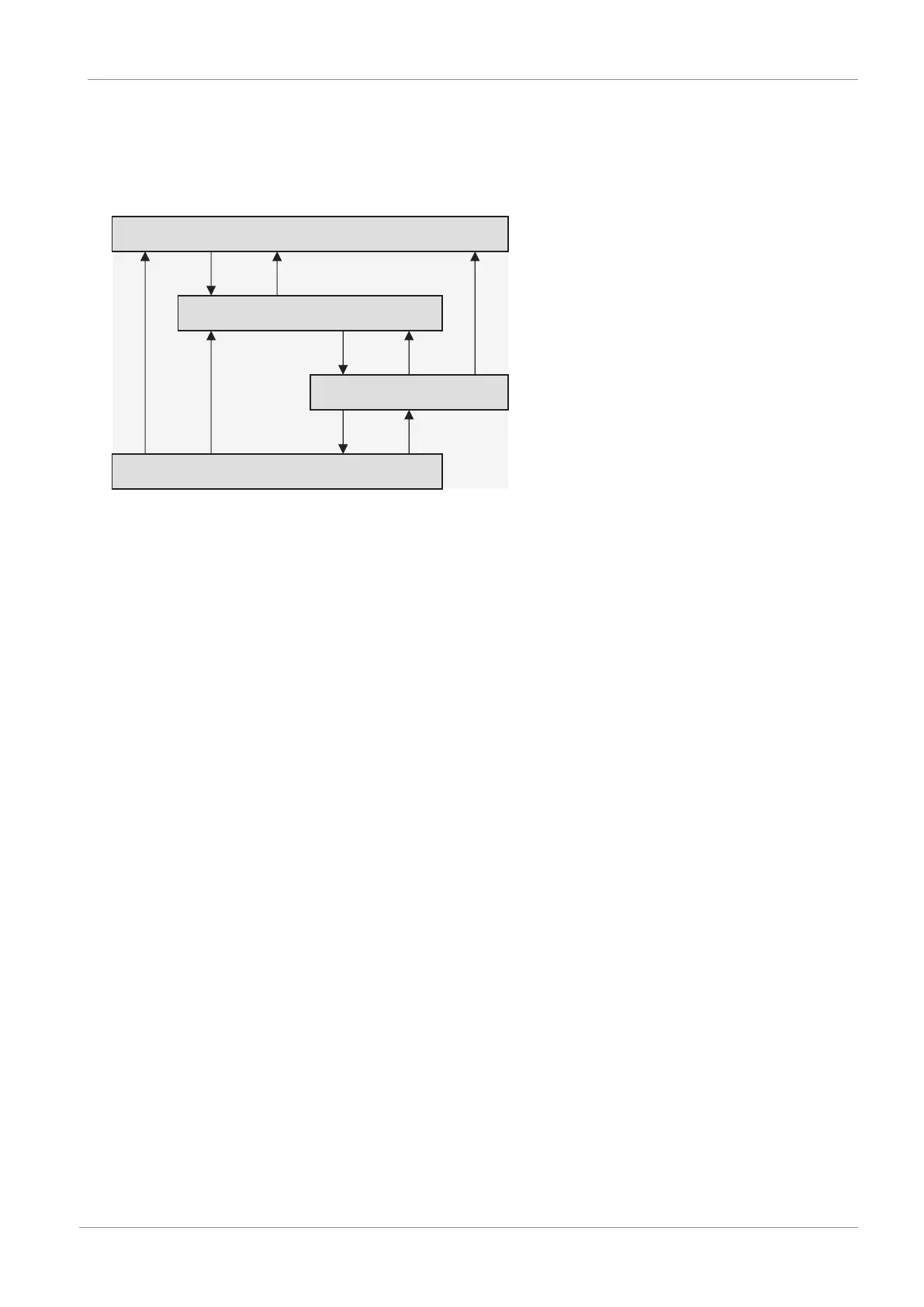
10.4 EtherCAT state machine
The EtherCAT state machine (ESM) controls the different operating states of an EtherCAT slave along with any potential
state change. Different functions can be carried out in the EtherCAT slaves depending on the individual states.
Safe-Operational
Pre-Operational
Operational
Init
(PI)
(SI)
(OI)
(OP)
(PS) (SP)
(OS)(SO)
(IP)
Fig.11: EtherCAT state machine – Potential operating states and state changes
Operating states
§ Init
State after an EtherCAT slave is switched on. The configuration starts; saved values are loaded. Neither SDO nor PDO
communication is possible using the mailbox and process data channels, i.e. the master and slave do not communicate
directly.
§ Pre-operational
The mailbox channel is active; the master and slaves exchange application-specific parameters using SDO
communication.
§ Safe-operational
The mailbox and process data channels are active. All network nodes are shifted into a safe state. The slaves send
current actual values to the master, but they ignore the master's set values and instead refer to internal default values.
§ Operational
The mailbox and process data channels are active. This state characterizes normal operation, i.e. the master and slaves
exchange set and actual values.