STOBER 7 | What you should know before commissioning
02/2020 | ID 442516.07
19
7.2 Meaning of parameters
You can use parameters to adapt the function of a parameter to your specific axis model and your work environment. In
addition, parameters visualize the current actual values (actual velocity, actual torque, etc.) and trigger general actions like
Save values, Test phase, etc.
7.2.1 Parameter groups
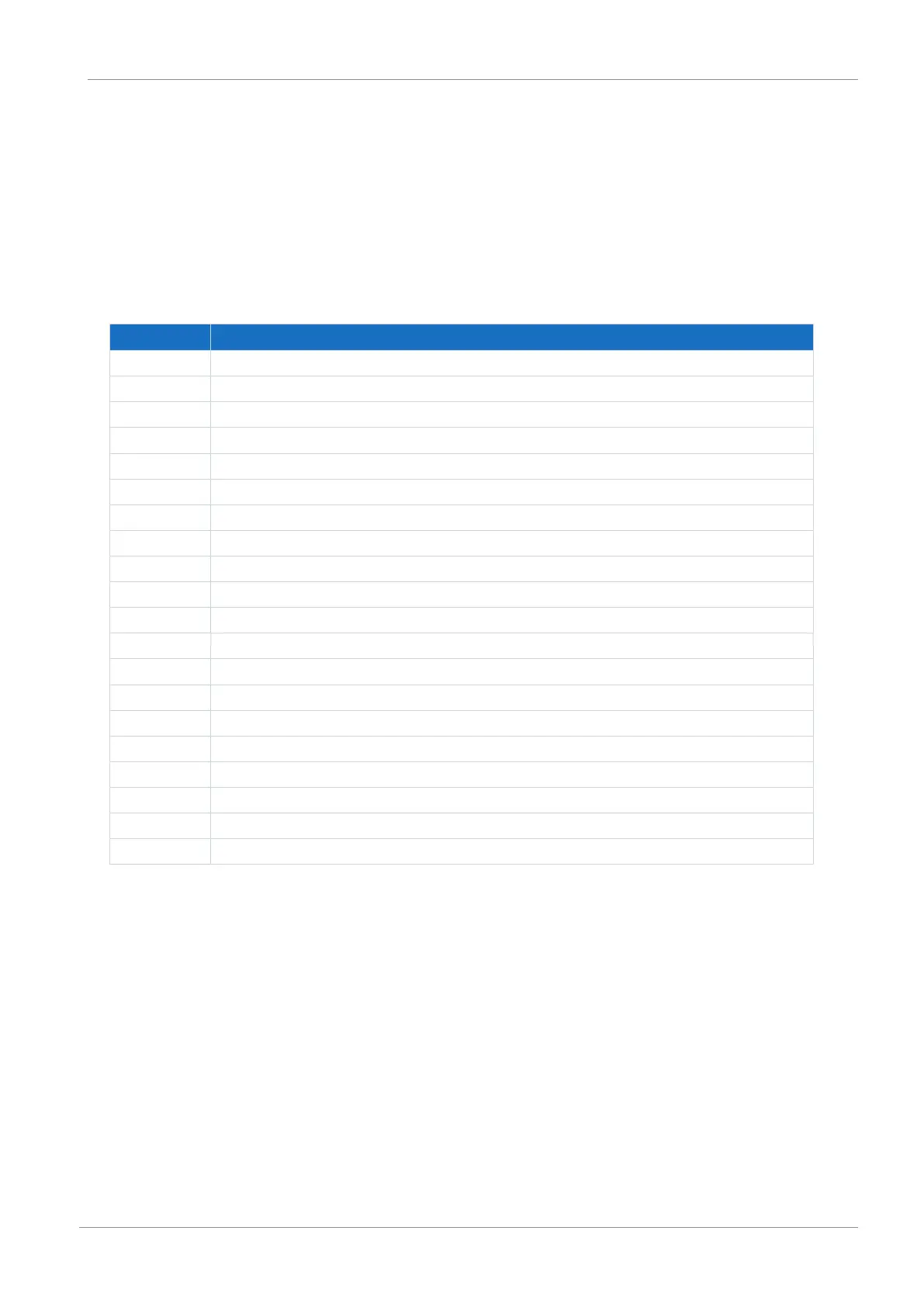
Parameters are assigned to individual groups by topic. The 6th generation of STOBER drive controllers differentiates
between the following parameter groups.
Group Topic
A Drive controllers, communication, cycle times
B Motor
C Machine, velocity, torque/force, comparators
D Set value
E Display
F Terminals, analog and digital inputs and outputs, brake
G Technology – Part 1 (depending on the respective application)
H Encoders
I Motion (all motion settings)
J Motion blocks
K Control panel
L Technology – Part 2 (depending on the respective application)
M Profile
P Customer-specific parameters (programming)
Q Customer-specific parameters, instance-dependent (programming)
R Production data for the drive controller, motor, brakes, motor adapter, gear unit and geared motor
S Safety (safety technology)
T Scope
U Protection functions
Z Fault counter
Tab. 2: Parameter groups