Chapter 7 Usage of Various Functions
7-104
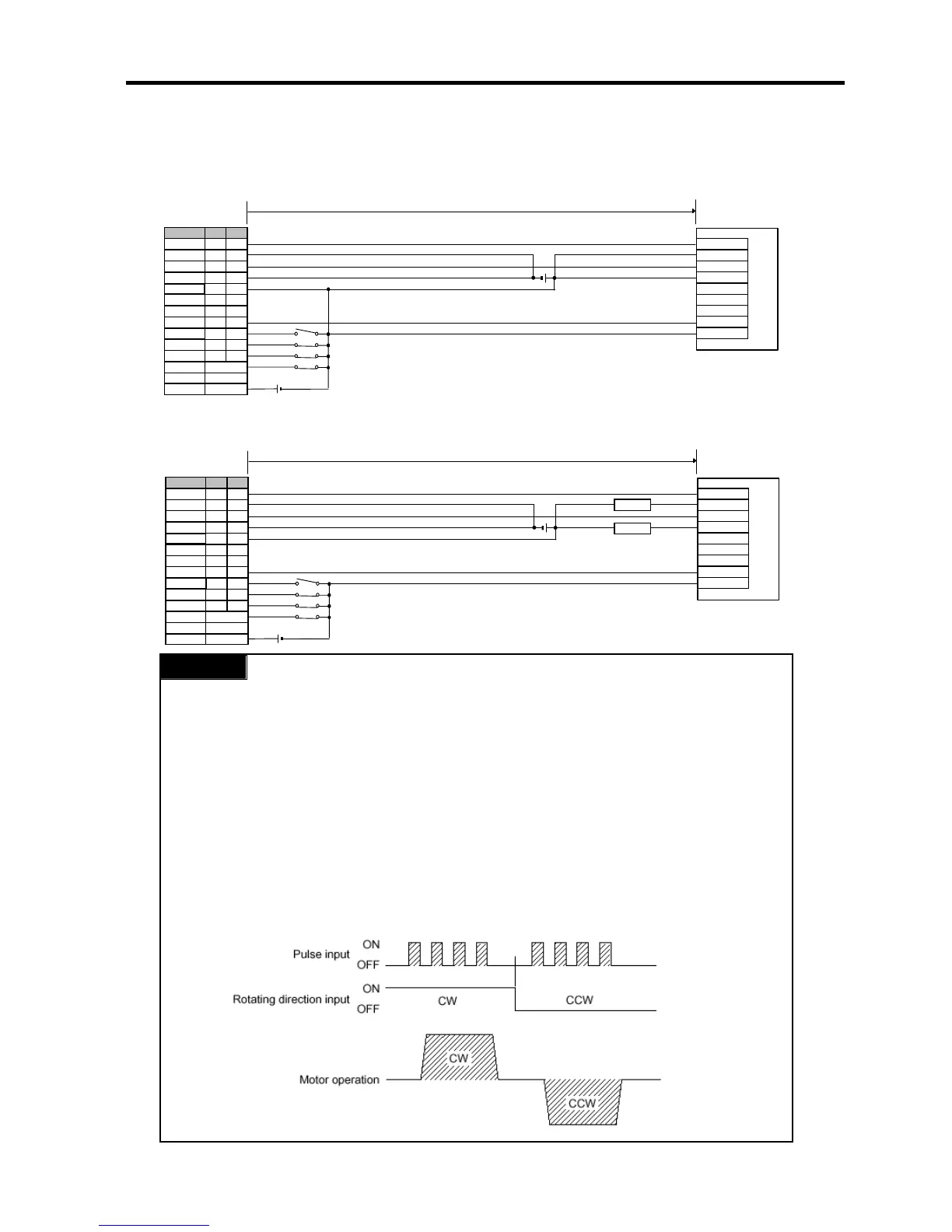
7.3.6 Wiring with servo and stepping motor driver (Open Collector)
1) Wiring with stepping motor driver(DC 5V)
2) Wiring with stepping motor driver (DC 24V)
Remark
1 ) In case of VEXTA RK series, TIMMING output turns on when a motor rotates at every 7.2 degree.
For exact ‘return to origin’, we suggest you to configure ‘AND’ operation using TIMMING output and DOG
sensor. It may be different to each system features to return to origin by the DOG sensor without TIMMING
output signal (The rated input for the origin of K120S is DC 24V.)
2) Using DC 24V, wire a proper resistor to driver in series.
3) Input points for origin, approximate origin point, and upper/lower limit signal are fixed but, if they’re not used you
able to use them general input point. You can use emergency stop with the command(POSCTR)
4) Positioning phase of K120S is as follow: Set the input mode of a step mode driver to 1 phase input mode
because motor operation mode is determined by rotating direction input.
CW-
CW+
CCW-
CCW+
TIMING
COM
DC24V
Max : 2m
Stepping Motor Drive