Basic Programming 5 - 10
b5-07 PI Offset Adjustment
Every time the PI output is updated, the PI offset is summed with the PI output. If the Drive is configured for Differential PI
Regulation (H3-09=16), then the PI Offset is the targeted maintained differential between the signal measured on analog input
A1 and the signal measured on analog input A2.
b5-08 PI Primary Delay Time Constant
Acts as a time based filter that lowers the responsiveness of the PI function, but also makes the function more stable when the
setpoint varies rapidly or when the feedback is noisy.
b5-09 PI Output Level Selection
Normally, the output of the PI function causes an increase in motor speed whenever the measured feedback is below the
setpoint. This is referred to as direct acting response. However, if b5-09=1, the output of the PI function causes the motor to
slow down when the feedback is below the setpoint. This is referred to as reverse acting response.
b5-10 PI Output Gain Setting
Applies a multiplier to the output of the PI function. Using the gain can be helpful when the PI function is used to trim the
Speed Command. Increasing b5-10 causes the PI function to have a greater regulating affect on the speed command.
b5-12 PI Feedback Reference Missing Detection Selection
b5-13 PI Feedback Loss Detection Level
b5-14 PI Feedback Loss Detection Time
Loss of feedback can cause great and potentially dangerous problems to a PI application. The Drive can be programmed to turn
on a digital output whenever a loss of feedback occurs.
Feedback Loss Detection is turned on by b5-12. When b5-12=1, the Drive acknowledges the loss of feedback without
stopping or turning on the fault output (MA-MB). If b5-12=2, the Drive coasts to a stop and turns on the fault output if the
feedback is determined to be lost.
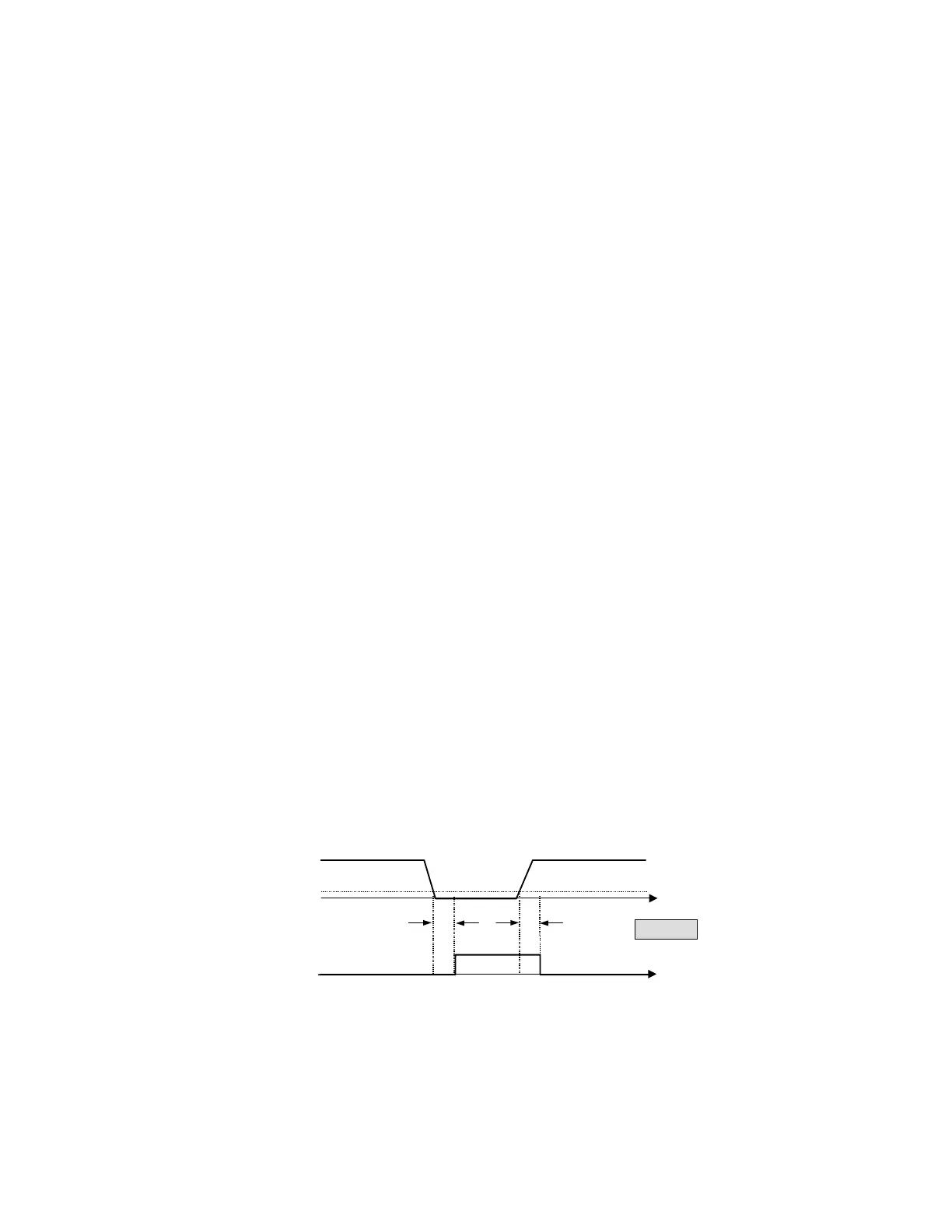
The Drive interprets feedback loss whenever the feedback signal drops below the value of b5-13 and stays below that level for
at least the time set into b5-14.
Fig 5.10 PI Feedback Loss Detection Chart
Measured
Feedback
T
Feedback
Loss Output
T
b5-13
T = b5-14