Basic Programming 5 - 19
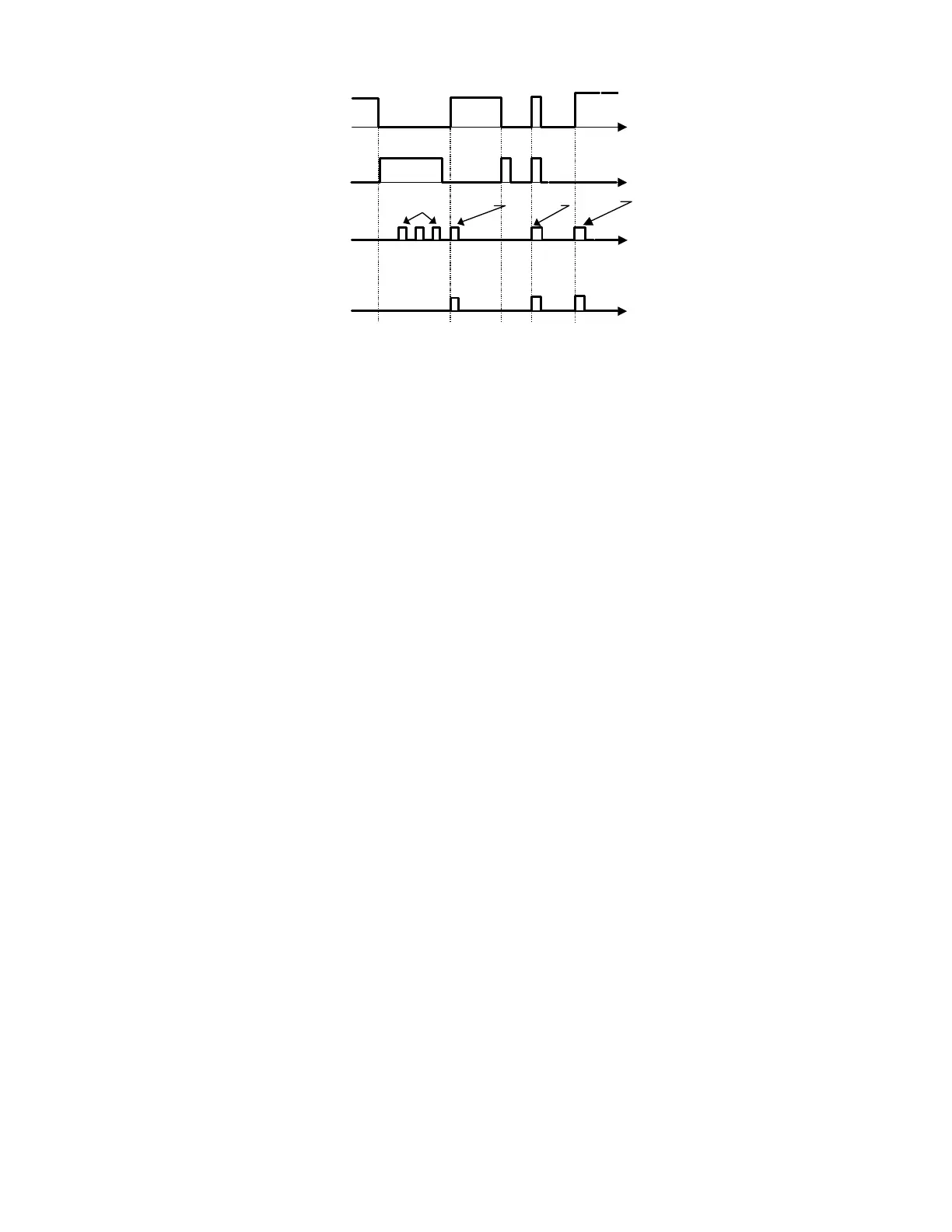
Fig 5.17 Auto Restart Timing Chart
The Auto Restart count is reset back to zero if any of the following occur:
∗ No further faults for ten minutes after the last retry.
∗ The Drive’s power is turned off (the Drive must be unpowered long enough to let control power dissipate).
∗ The SHIFT/RESET key is pushed after the last reset attempt.
The following faults are covered by the Auto Restart function:
∗ OC (Overcurrent) ∗ LF (Output Open Phase)
∗ PF (Input Phase Loss) ∗ PUF (DC Bus Fuse)
∗ OL1 (Motor Overload) ∗ OL3 (Overtorque)
∗ OL2 (Inverter Overload) ∗ OV (DC Bus Overvoltage)
∗ GF (Ground Fault) ∗ UV1 (DC Bus Undervoltage)
∗ OH1 (Overheat)
In order for Auto Restart after a UV1 fault, to be successful, Momentary Power Loss Ride-thru must be enabled (L2-01=1 or 2).
Setting H2-01 or H2-02 equal to “1E” can configure a digital output as a “Restart Enabled” to signal if an impending Auto
Restart is possible.
Torque Detection
L6-01 Torque Detection Selection 1
L6-02 Torque Detection Level 1
L6-03 Torque Detection Time 1
The Drive can be programmed to indicate when either an overtorque or an undertorque condition exists. A digital output must
be programmed for “Torque Detection” (H2-01/H2-02=B or 17). Warning of an overtorque condition can indicate a motor jam
and an undertorque condition can indicate a broken belt, for example.
t
t
t
t
run
fault
attempts
count
L2-03
overvoltage
trying each
L5-03 seconds
successful
1
OC
L2-03
2
voltage
remains high
for a long time,
then reset (1)
and run
L2-03
3
OC
OC condition
gone, resets (3)
and runs.
successful
try but failed
Drive trips on OC,
resets (2) and tries
again but motor still
shorted, trips again.