HW1484764
Daily Inspection Items
5-3
HW1484764
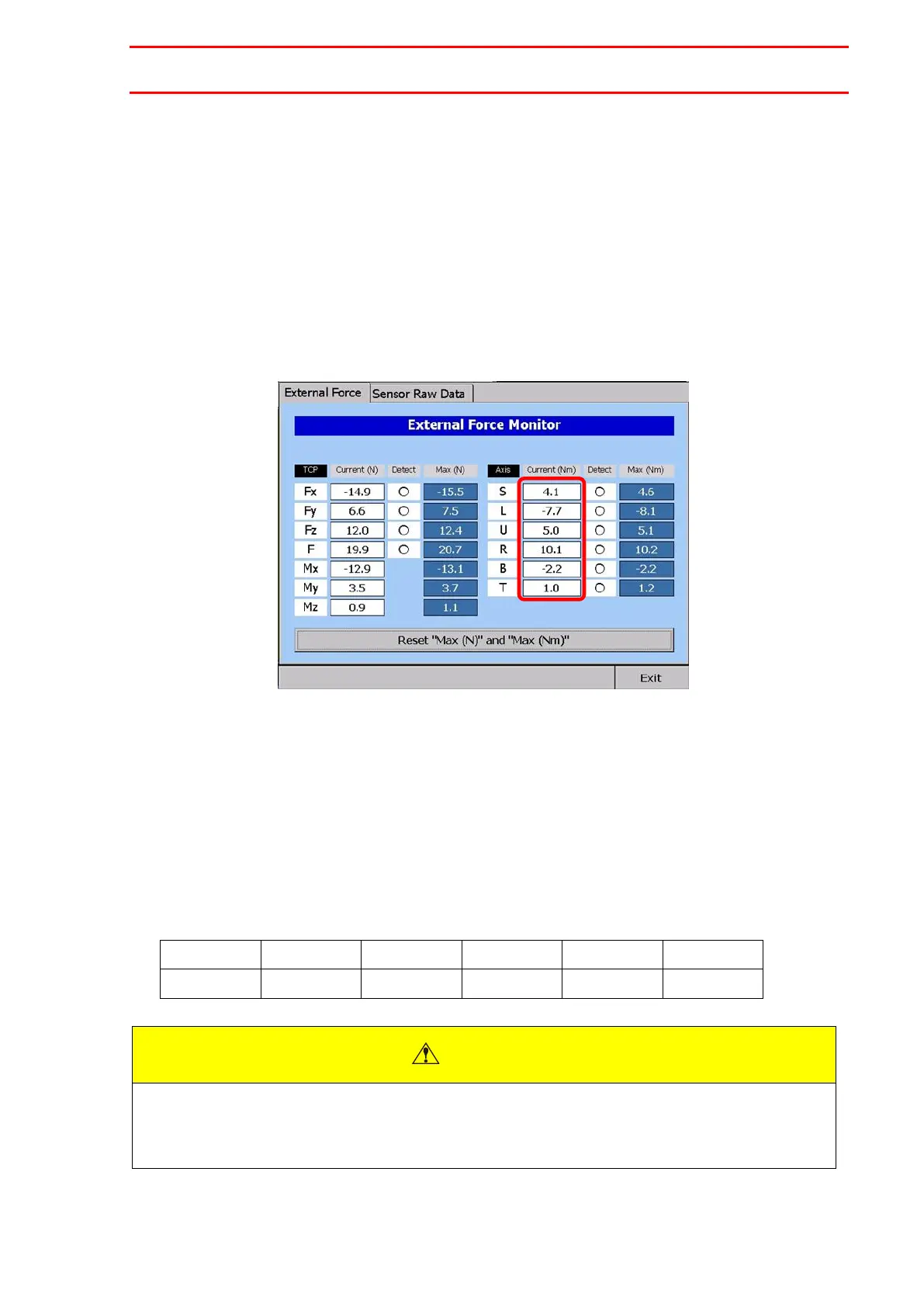
5.1.2. Checking the Torque Sensor Status Using the External Force Monitor
To check the torque sensor status, periodically open the External Force Monitor screen with the
manipulator in the same posture and under the same load condition. Record the value of the external
torque acting on each axis, shown on the right side of the screen, and make sure that the difference
from when you started using the manipulator is not growing remarkably.
You are recommended to conduct this inspection once a day, for example, during everyday check-ups.
For information on how to operate the external force monitor output, refer to “2.8 External Force
Monitor Output ".
If the difference in external torque acting on each axis from when you started using the manipulator
has become large, reconfigure the torque sensor home position with reference to the next section “5.2
How to Reconfigure the Torque Sensor Home Position".
In particular, the difference in external torque acting on each axis from when you started using the
manipulator may exceed the value shown in the table below, affecting the estimated external force
value. Therefore, reconfigure the torque sensor home position for the axis.
Even if the difference in external torque acting on each axis from when you started using the
manipulator does not exceed the above value, reconfigure the torque sensor home position as soon
as an abnormality is suspected regarding the PFL or escape from clamping function.