Parameters 175
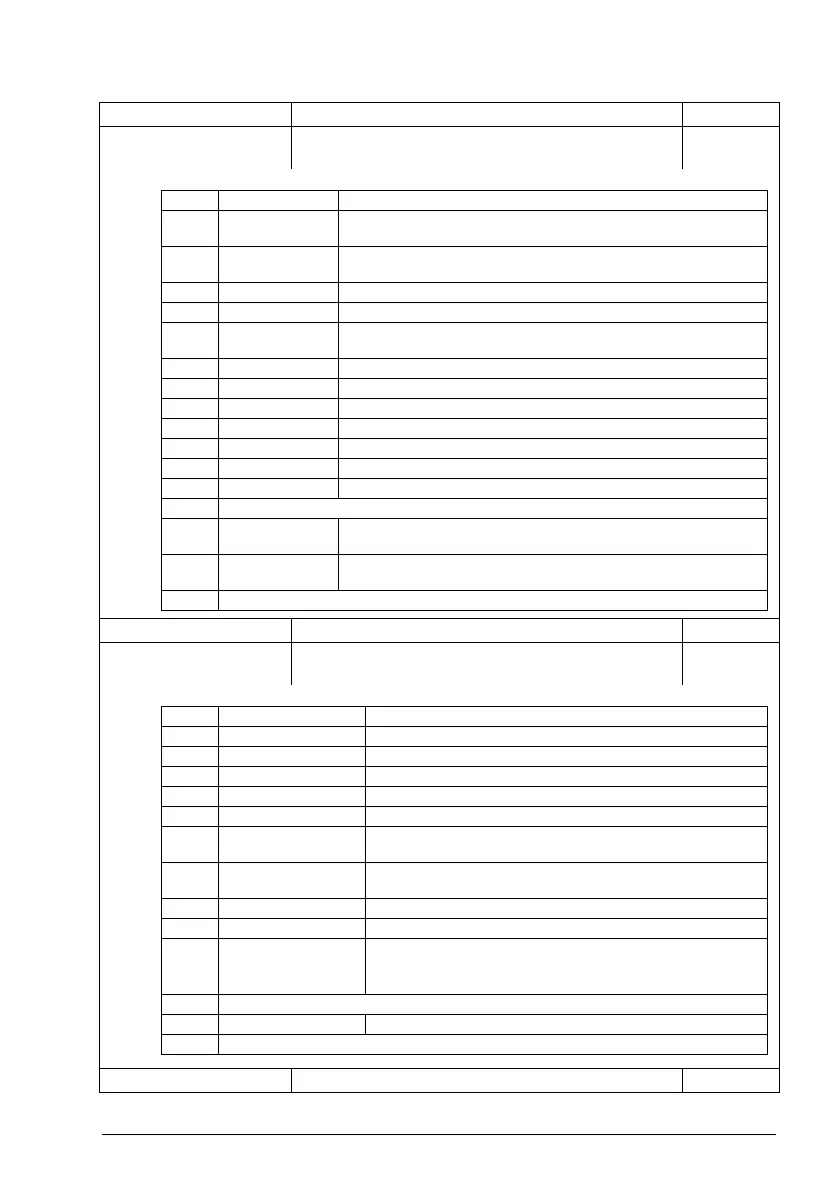
06.16 Drive status word 1 Drive status word 1.
This parameter is read-only.
0b0000
0b0000...0b1111 Drive stat us wo rd 1. 1 = 1
06.17 Drive status word 2 Drive status word 2.
This parameter is read-only.
0b0000
0b0000...0b1111 Drive stat us wo rd 2. 1 = 1
No. Name/Value Description Def/FbEq16
Bit Name Description
0 Enabled 1 = Both run enable (see par. 20.12) and start enable (20.19) signals
are present.
1 Inhibited 1 = Start inhibited. To start the drive, the inhibiting signal (see par.
06.18) must be removed and the start signal cycled.
2 DC charged 1 = DC circuit has been charged.
3 Ready to start 1 = Drive is ready to receive a start command.
4Following
reference
1 = Drive is ready to follow given reference.
5 Started 1 = Drive has been started.
6 Modulating 1 = Drive is modulating (output stage is being controlled).
7 Limiting 1 = Any operating limit (speed, torque, etc.) is active.
8 Local control 1 = Drive is in local control.
9 Network control 1 = Drive is in network control (see page 17).
10 Ext1 active 1 = Control location EXT1 active.
11 Ext2 active 1 = Control location EXT2 active.
12 Reserved
13 Start request 1 = Start requested. 0 = When Enable to rotate signal (see par.
20.22) is 0 (rotating of the motor is disabled).
14 Running 1 = Drive is controlling speed or frequency, in PID sleep or pre-
magnetization.
15 Reserved
Bit Name Description
0 Identification run done 1 = Motor identification (ID) run has been performed.
1 Magnetized 1 = The motor has been magnetized.
2 Torque control 1 = Torque control mode active.
3 Speed control 1 = Speed control mode active.
4 Reserved
5 Safe reference active 1 = A “safe” reference is applied by functions such as
parameters 49.05 and 50.02.
6 Last speed active 1 = A “last speed” reference is applied by functions such as
parameters 49.05 and 50.02.
7...8 Reserved
9 Jogging active 1 = Jogging enable signal is on.
10 Above limit 1 = Actual speed, frequency or torque equals or exceeds limit
(defined by parameters 46.31…46.33). Valid in both directions of
rotation.
11…12 Reserved
13 Start delay active 1 = Start........ delay (par. 21.22) active.
14…15 Reserved