144 Parameters
Constant time The drive pre-magnetizes the motor before start. The pre-
magnetizing time is defined by parameter 21.02
Magnetization time. This mode should be selected if constant
pre-magnetizing time is required (e.g. if the motor start must
be synchronized with the release of a mechanical brake). This
setting also guarantees the highest possible break-away
torque when the pre-magnetizing time is set long enough.
WARNING! The drive will start after the set
magnetizing time has passed even if motor
magnetization is not completed. In applications where
a full break-away torque is essential, ensure that the constant
magnetizing time is long enough to allow generation of full
magnetization and torque.
1
Automatic Automatic start guarantees optimal motor start in most cases.
It includes the flying start function (starting into a rotating
motor) and the automatic restart function (a stopped motor
can be restarted immediately without waiting the motor flux to
die away). The drive motor control program identifies the flux
as well as the mechanical state of the motor and starts the
motor instantly under all conditions.
2
21.02 Magnetization time Defines the pre-magnetization time when
• parameter 21.01 Start mode is set to Constant time (in
Vector motor control mode), or
• parameter 21.19 Scalar start mode is set to Const time (in
scalar motor control mode).
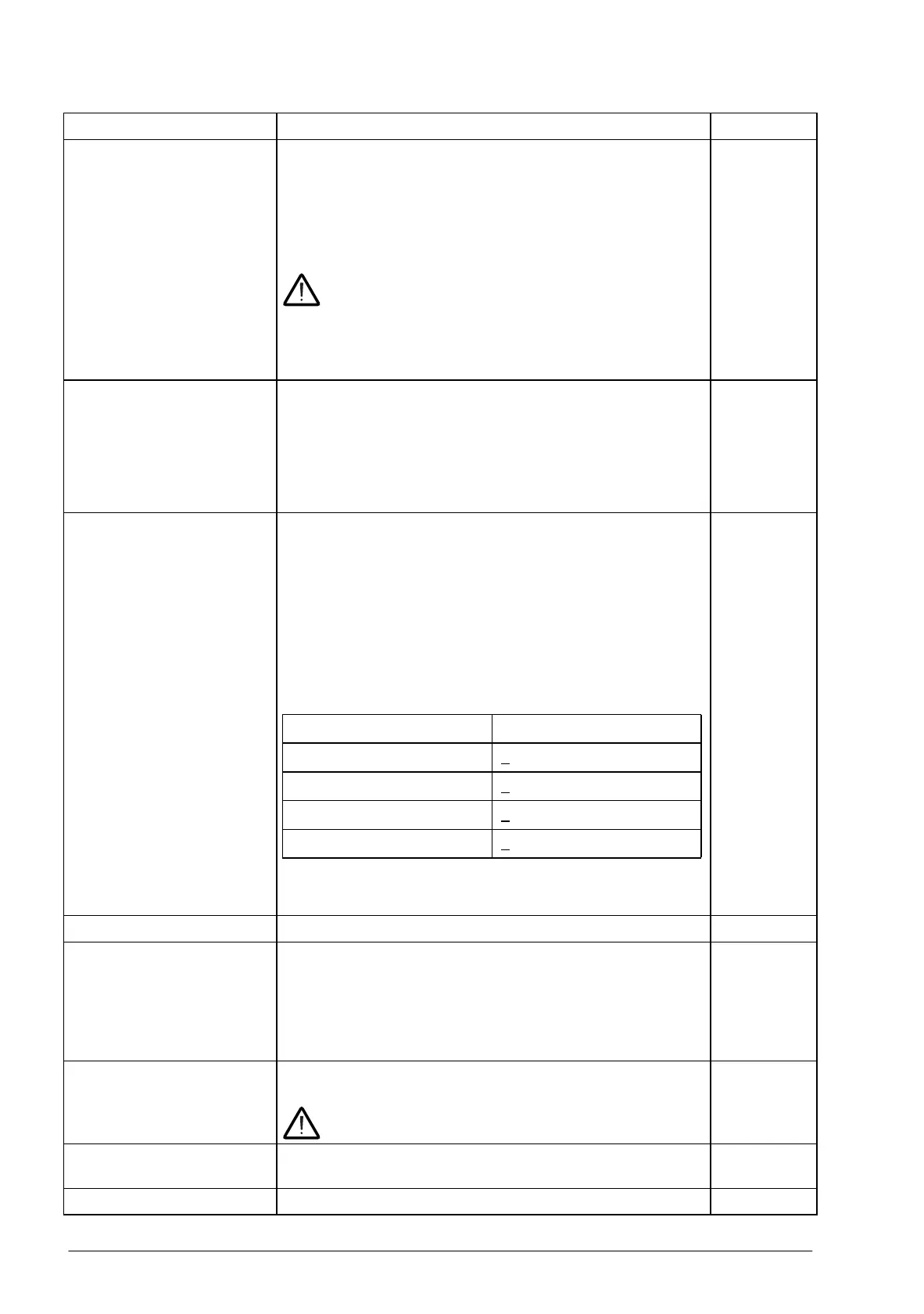
After the start command, the drive automatically
premagnetizes the motor for the set time. To ensure full
magnetizing, set this parameter to the same value as, or
higher than, the rotor time constant. If not known, use the rule-
of-thumb value given in the table below:
Note: This parameter cannot be changed while the drive is
running.
500 ms
0 … 10000 ms Constant DC magnetizing time. 1 = 1 ms
21.03 Stop mode Selects the way the motor is stopped when a stop command
is received.
Additional braking is possible by selecting flux braking (see
parameter 97.05 Flux braking).
Note: This parameter has no effect in a follower drive in a
master/follower configuration.
Coast
Coast Stop by switching off the output semiconductors of the drive.
The motor coasts to a stop.
WARNING! If a mechanical brake is used, ensure it is
safe to stop the drive by coasting.
0
Ramp Stop along the active deceleration ramp. See parameter
group 23 Speed reference ramp on page 157.
1
Torque limit Stop according to torque limits (parameters 30.19 and 30.20). 2
No. Name/Value Description Def/FbEq16
Motor rated power Constant magnetizing time
< 1 kW >
50 to 100 ms
1 to 10 kW >
100 to 200 ms
10 to 200 kW >
200 to 1000 ms
200 to 1000 kW >
1000 to 2000 ms