5.2.4.17
ARM
The parameters in accordance with the sections below are used to obtain the maximum
performance of the robot, in regards to maximum acceleration and deceleration. These
parameters affect the control of the servo regulation.
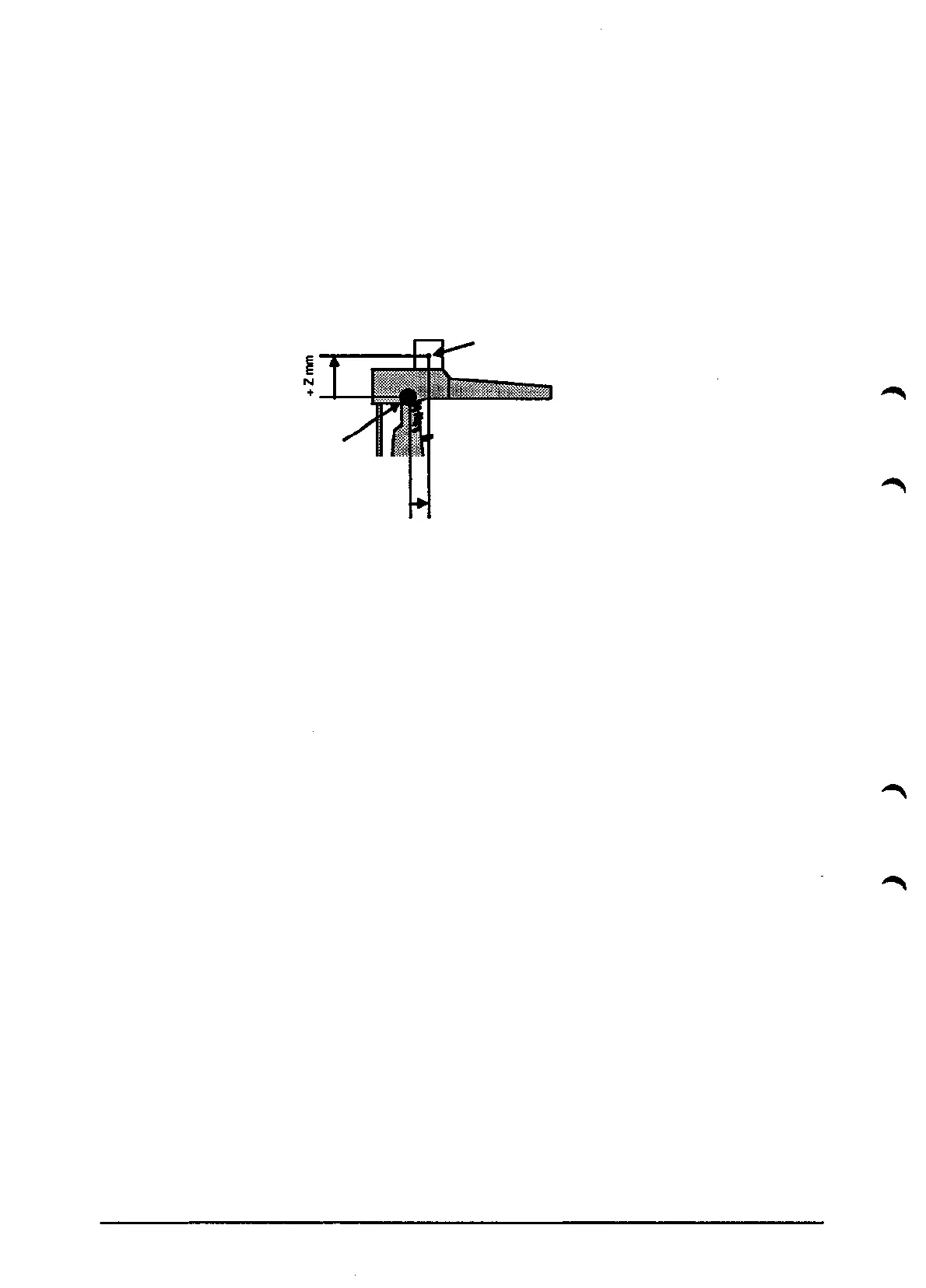
Equipment at the upper arm
The following parameters are used to define the equipment fixed to the upper arm of
the robot with respect to weight and position of the centre of gravity. In cases with
several masses the position and sizes of the joint centre of gravity must be calculated.
Center of gravity
of mounted equipment
Pivot point
+ Xmm
Parameter I
The parameter indicates the weight of the equipment concerned.
Menu
LOAD
Guide text
MASS
Def. range
Default value
Permitted values
+ ARM
(KG) =
IRB2000
0-15 kg
1KB 2000
Okg
IRB2000
0-5 kg
IR63000
0-15 kg
1KB 3000
Okg
IRB3000
0-15 kg
IRB3200
0-15 kg
IRB3200
Okg
IRB3200
0-10 kg
IRB6000
2.4-120
2.4-150
2.8-100
3.0-75
S3.0-100
2.25PE-75
2.8PT
1KB 6000
Okg
1KB 6000
Ace. to def.
i
155
kg
185 kg
135
kg
95 kg
135
kg
110 kg
135
kg
range.
See Description chapter
5.1.7 for limitation.
INSTALLATION
5:38
S3