Rockwell Automation Publication IASIMP-QS035B-EN-P - April 2015 23
Prepare the Kinetix 5500 Drive Hardware Chapter 1
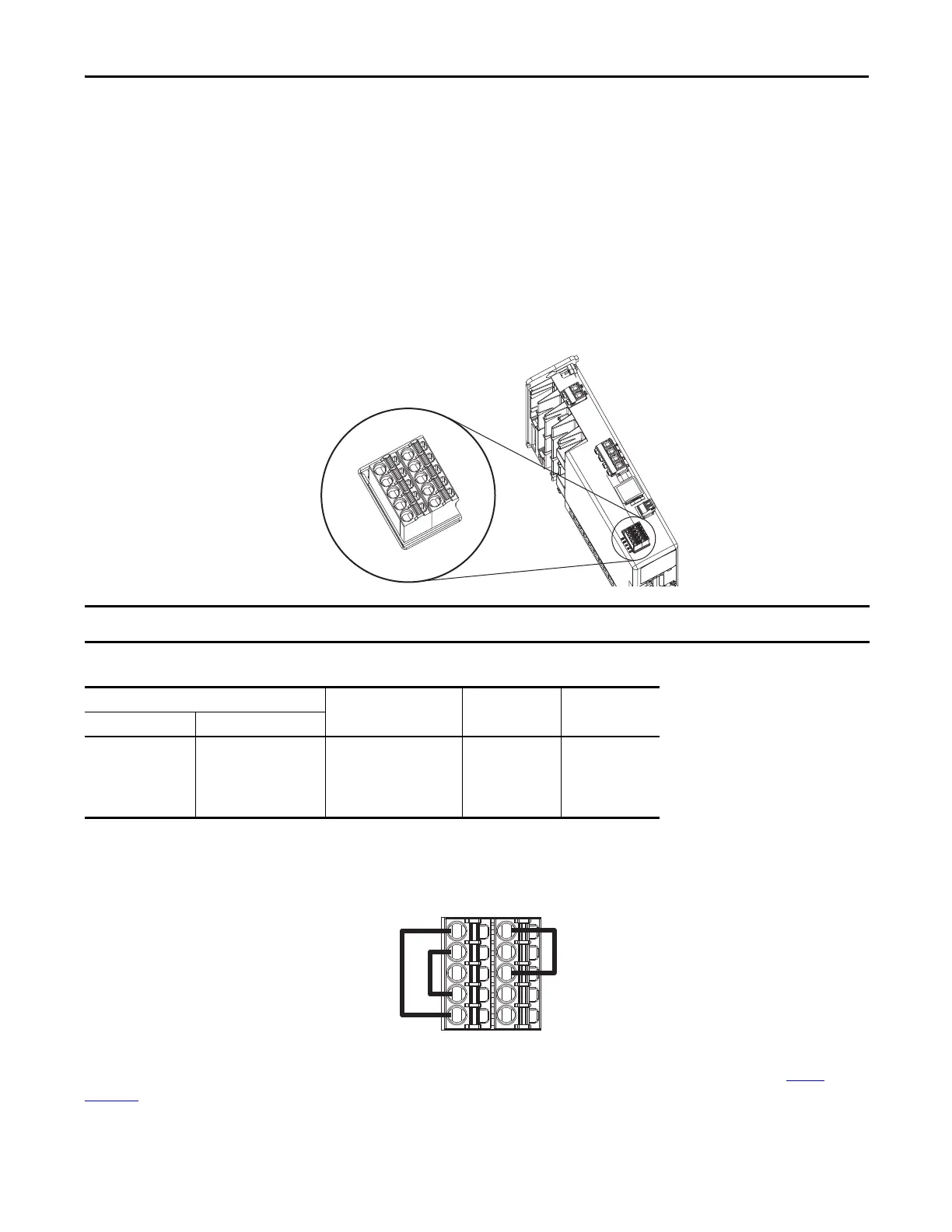
Disable the Safe Torque-off Feature
The safe torque-off circuit is designed to safely turn off all of the output-power transistors. Each Kinetix 5500 drive ships
with one 10-pin wiring plug for wiring to safety devices. The drive does not operate without a safety circuit or safety bypass
wiring. For applications that do not require the safe torque-off feature, you must install jumper wires to bypass the safe
torque-off circuitry. The application used in this quick start does not include safety devices, so you must disable the safe
torque off feature.
The safe torque-off (STO) connector uses spring tension to secure the wire. Depress the tab, along side each pin, to insert or
r
elease the wire. Two rows of pins are provided for drive-to-drive connections.
Table 5 - Safe Torque-off (STO) Terminal Plug Wiring
To bypass the safety function, wire these signals as shown. With the jumper wires installed, the safe-off feature is not used.
For more information on the safe torque-off feature, see Kinetix 5500 Servo Drives User Manual, publication
2198-
UM001.
Stranded wires must terminate with ferrules to prevent short circuits, per table D7 of EN 13849.
1
2
3
4
5
SB+
SB-
S1
SC
S2
Remove
For DC
Bus Only
Kinetix 5500 Drive
Top View
Safe Torque-off (STO)
Connector Plug
Safe Torque-off (STO) Connector Recommended Wire Size
mm
2
(AWG)
Strip Length
mm (in.)
Torque Value
N•m (lb•in)
Pin Signal
STO-1
STO-2
STO-3
STO-4
STO-5
SB+
SB-
S1
SC
S2
1.5…0.2
(16…24)
10 (0.25) N/A
Pin 1
SB+
SB-
S1
SC
S2
Safe Torque-off
(STO) Connectors
 Loading...
Loading...







