176 Rockwell Automation Publication 2094-UM001J-EN-P - March 2017
Chapter 7 Troubleshooting the Kinetix 6000 Drive System
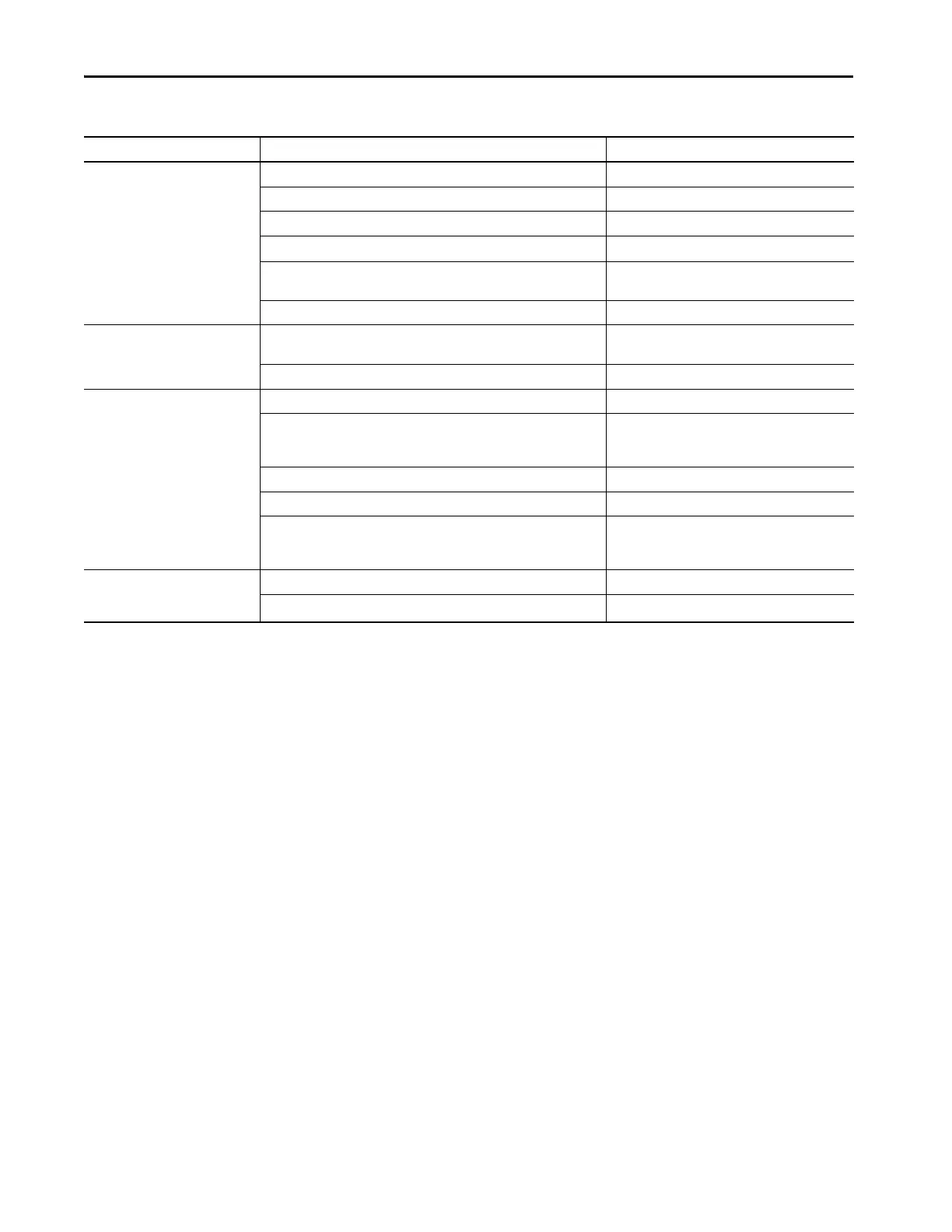
No rotation
The motor connections are loose or open. Check motor wiring and connections.
Foreign matter is lodged in the motor. Remove foreign matter.
The motor load is excessive. Verify the servo system sizing.
The bearings are worn. Return the motor for repair.
The motor brake is engaged (if supplied).
• Check brake wiring and function.
• Return the motor for repair.
The motor is not connect to the load. Check coupling.
Motor overheating
The duty cycle is excessive.
Change the command profile to reduce acceleration or
deceleration or increase time.
The rotor is partially demagnetized causing excessive motor current. Return the motor for repair.
Abnormal noise
Motor tuning limits are set too high. Run Tune in the Logix Designer application.
Loose parts are present in the motor.
• Remove the loose parts.
• Return motor for repair.
•Replace motor.
Through bolts or coupling is loose. Tighten bolts.
The bearings are worn. Return motor for repair.
Mechanical resonance.
Notch filter can be required (refer to Axis Properties
dialog box, Output tab in the Logix Designer
application).
Erratic operation - Motor locks into
position, runs without control or
with reduced torque.
Motor power phases U and V, U and W, or V and W reversed. Check and correct motor power wiring.
Sine, Cosine or Rotor leads are reversed in the feedback cable connector. Check and correct motor feedback wiring.
Table 111 - General System Anomalies (continued)
Condition Potential Cause Possible Resolution

 Loading...
Loading...




