Rockwell Automation Publication 2094-UM001J-EN-P - March 2017 243
Configure the Load Observer Feature Appendix D
c. Position Loop Bandwidth: Kpp = Kvp/4
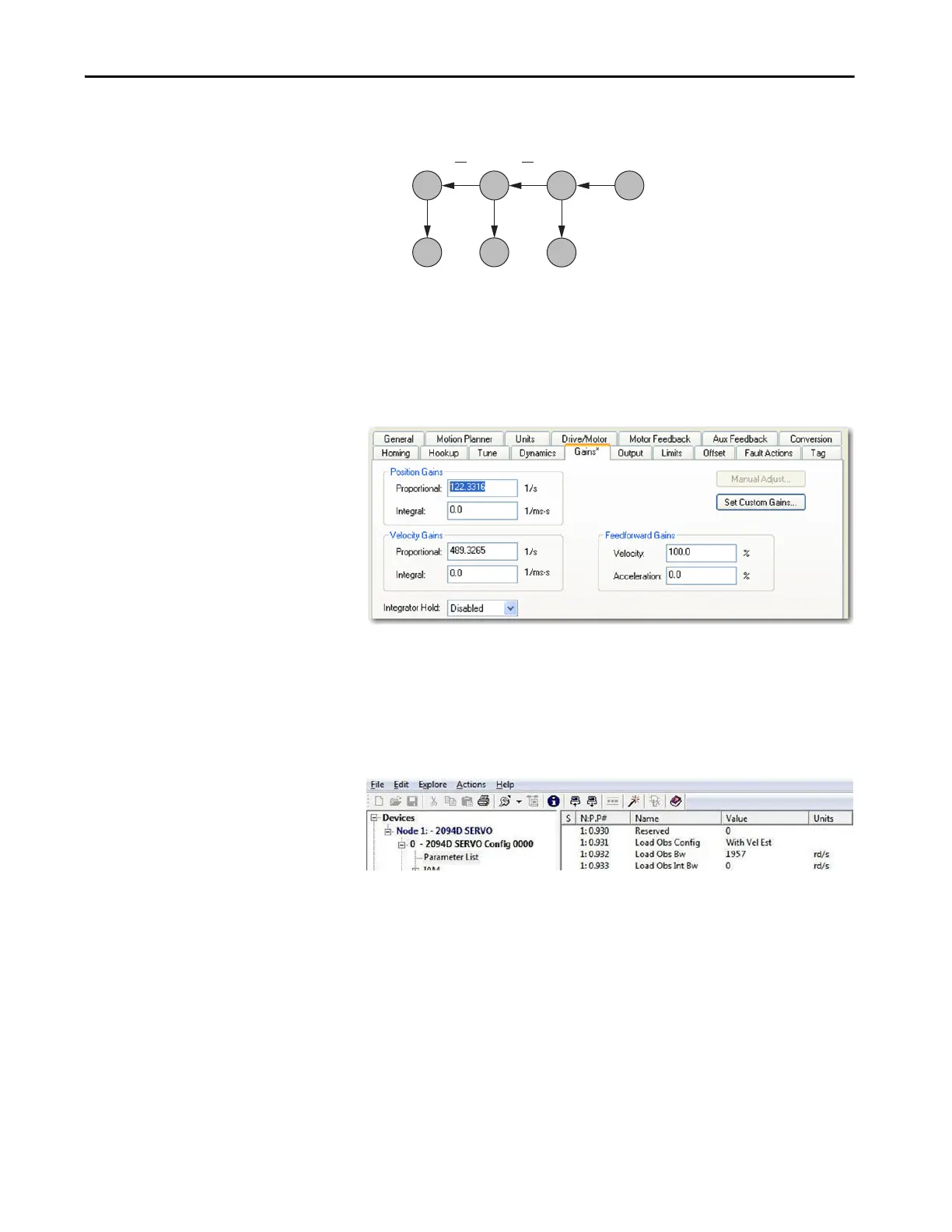
5. Configure these settings and values on the Gains tab.
a. Position Proportional Gain = Kpp
b. Velocity Proportional Gain = Kvp
c. Velocity Feedforward Gain = 100%
d. Integrator Hold = Disabled
6. Configure these IDN parameter values.
a. IDN P-431 = 2 (load observer with velocity estimate)
b. IDN P-432 = Kop
c. IDN P-433 = 0
d. IDN P-065 = 1
7. Click the Output tab in the Axis Properties dialog box and verify these
settings.
a. Load Inertia Ratio = 0
1
4
1
4
00
0
2.56
K
vp
Initial
K
pp
K
pi
K
vi
K
vp
K
op
K
oi

 Loading...
Loading...








