Actuator controls AUMATIC AC 01.1 / ACExC 01.1
DeviceNet Operation instructions
30
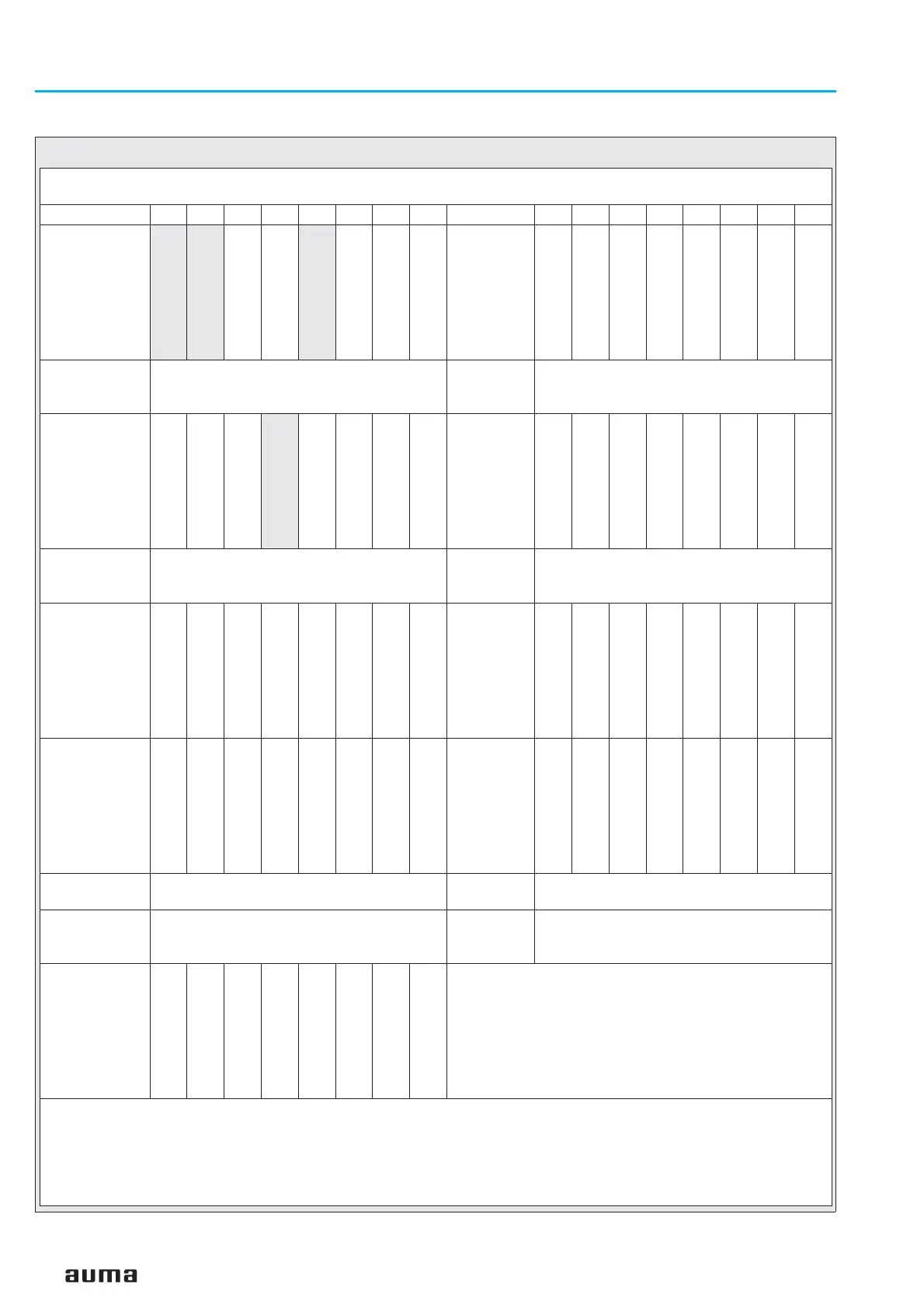
SELECTED PRODUCED PATH = 8
Data length = 17 byte
Bit
76543210 76543210
Byte 1
(Logical sig-
nals)
Fault ind.
1)
Warning ind.
1)
Running CLOSE
Running OPEN
Not ready ind.
1)
Setpoint position
Closed position
Open position
Byte 2
(Actuator
signals)
TSC (DSR)
TSO (DOEL)
LSC (WSR)
LSO (WOEL)
Local sw. position
Remote sw. position
Loss of phase
Thermal fault
Byte 3
E2 (Feedback)
E2 Feedback 1 (0 – 1 000 per mil) high byte
Byte 4
E2 (Feed-
back)
E2 Feedback 1 (0 – 1 000 per mil) low byte
Byte 5
(Physical ope-
ration)
Running LOCAL
Running REMOTE
Running with
handwheel
Actuator moving
1)
—
Stepping mode
—
Phys.drive break
Byte 6
(options)
DN1 dig.in 4
DN1 dig.in 3
DN1 dig.in 2
DN1 dig.in 1
Intermed. pos. 4
Intermed. pos. 3
Intermed. pos. 2
Intermed. pos. 1
Byte 7
(Analogue in-
put 1)
Analogue input 1 (0 – 1 000 per mil) high byte
2)
Byte 8
(Analogue
input 1)
Analogue input 1 (0 – 1 000 per mil) low byte
2)
Byte 9
(Not ready ind.)
External control
(reserved)
EMERGENCY
MODE
EMCY STOP active
—
(reserved)
Selector not REMO-
TE
Wrong command
Byte 10
(Fault sig-
nals)
—
Internal fault
Torque fault (CLO-
SE)
Torque fault (OPEN)
Loss of phase
Thermal fault
—
Configuration faulty
Byte 11
(Warning
signals
part 1)
Warning oper. time
Starts/run
Internal feedback
Internal warning
I/O1 Analog In2 loss
I/O1 Analog In1 loss
—
P-Feedback E4 loss
Byte 12
(Warnings
signals
part 2)
DN1 Analog In1 loss
DN1 Analog In2 loss
—
—
Setpoint E1 loss
Feedback E2 loss
(reserved)
Torque E6 loss
Byte 13
(Torque)
Torque value 1 (0 – 1 000 per mil) high byte
3)
Byte 14
(Torque)
Torque value 1 (0 – 1 000 per mil) low byte
3)
Byte 15
(Analogue in-
put 2)
Analogue input 2 (0 – 1 000 per mil) high byte
4)
Byte 16
(Analogue
input 2)
Analogue input 2 (0 – 1 000 per mil) low byte
3)
Byte 17
(Additional
data)
In intermed. position
—
—
—
Intermed. pos. 8
Intermed. pos. 7
Intermed. pos. 6
Intermed. pos. 5
1) Grey signals are collective signals. They contain the results of a disjunction (or-operation) of other information.
2) In bytes 7, 8, 15 and 16 the values of the analogue current inputs of the interface are transmitted.
The start and end values can be set at the AUMATIC via the push-buttons and the display. For further detailed instructions on the indication, operation and
setting of the AUMATIC refer to the operation instructions of the actuator (multi-turn actuator SA(R) … / part-turn actuator SG … with AUMATIC AC ...).
If the measuring values are 0.3 mA below the initial value a loss of signal is indicated.
3) Byte 13 and byte 14 transmit the current torque of the actuator (only if an MWG is installed in the actuator).
The value transmitted is the current torque in per mil of the nominal torque of the actuator. The torque zero point is at 500, for 100.0 % of the actuator torque in
direction OPEN the value 1000 is transmitted, for 100.0 % of the torque in direction CLOSE the value 0 is transmitted.
Process Input Data 3