9.2 Description of the output data
Actuator controls AUMATIC AC 01.1 / ACExC 01.1
Operation instructions DeviceNet
33
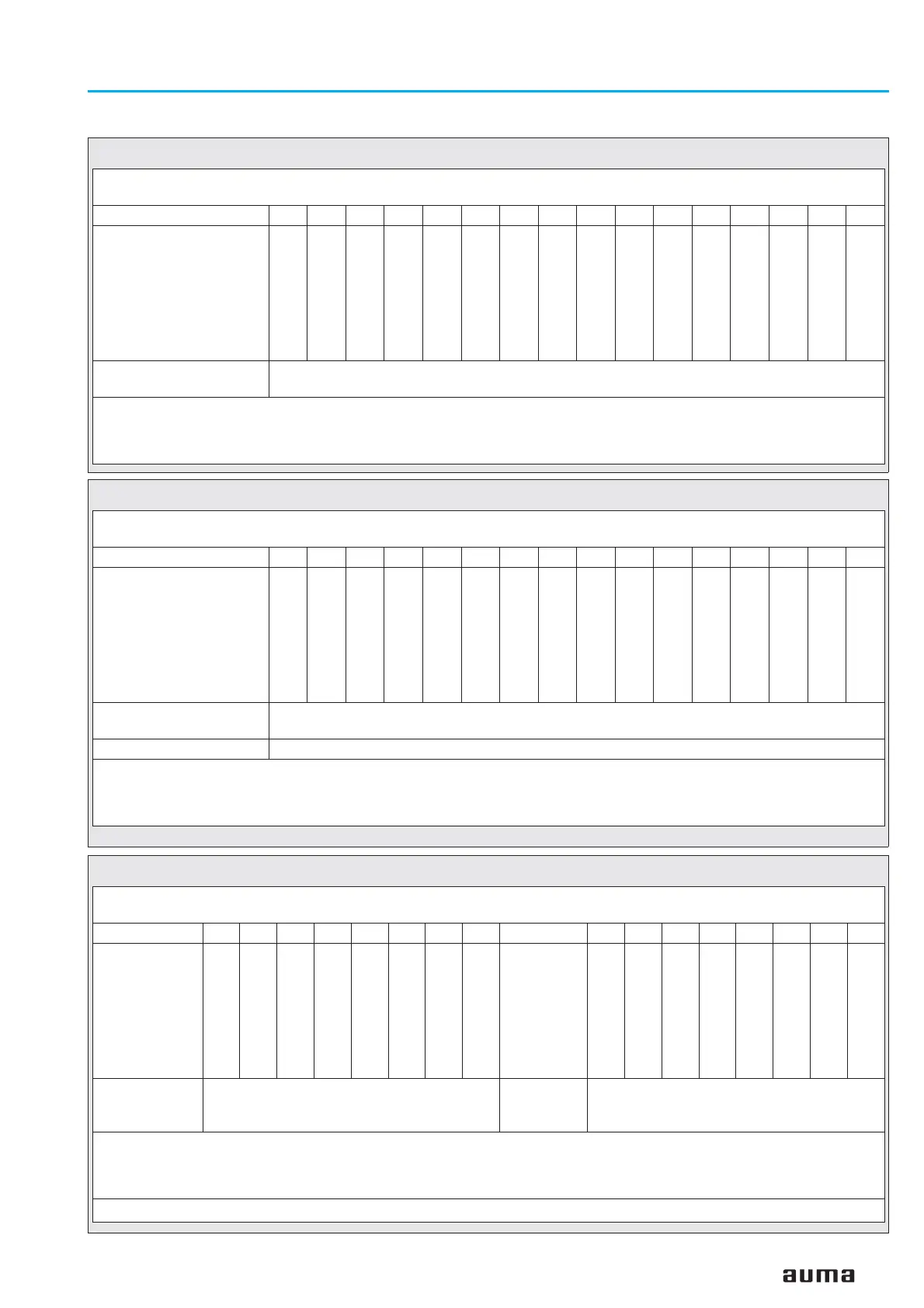
SELECTED CONSUMED PATH = 1
Data length = 4 byte
Bit
1514131211109876543210
Word 1
(commands)
1)
—
—
—
—
—
—
—
—
—
—
—
Remote SETPOINT
—
—
Remote CLOSE
Remote OPEN
Word 2
(E1 setpoint)
2)
E1 setpoint (0 – 1 000 per mil)
1) With the bits 0, 1 and 4, the operation commands are transmitted to the actuator. Only one of these bits may be set at any given time. If SETPOINT (remote
nominal) is set, the value of the nominal position (byte 3 and byte 4) is used.
The other bits are reserved for future extensions and must remain set to 0.
2) The nominal position has to be transmitted as a value between 0 to 1,000 per mil. When these limits are exceeded the actuator
stops and signals the fault “
WRONG COMMAND”.
Standard Output
SELECTED CONSUMED PATH = 2
Data length = 6 byte
Bit
1514131211109876543210
Word 1
(commands)
1)
—
—
—
—
—
—
—
—
—
—
—
Remote SETPOINT
—
—
Remote CLOSE
Remote OPEN
Word 2
(E1 setpoint)
2)
E1 setpoint (0 – 1 000 per mil)
Word 3
Reserved
1) With the bits 0, 1 and 4, the operation commands are transmitted to the actuator. Only one of these bits may be set at any given time. If SETPOINT (remote
nominal) is set, the value of the nominal position (byte 3 and byte 4) is used.
The other bits are reserved for future extensions and must remain set to 0.
2) The nominal position has to be transmitted as a value between 0 to 1,000 per mil. When these limits are exceeded the actuator
stops and signals the fault “
WRONG COMMAND”.
Standard One Analog Output
SELECTED CONSUMED PATH = 3
Data length = 8 byte
Bit
76543210 76543210
Byte 1
(Commands)
1)
—
—
—
—
Reset
Remote SETPOINT
Remote CLOSE
Remote OPEN
Byte 2
(Com-
mands)
1)
—
—
—
—
—
—
—
—
Byte 3
(E1 setpoint)
2)
E1 Setpoint 1 (0 – 1 000 per mil) high byte
Byte 4
(E1 set
-
point)
2)
E1 Setpoint 1 (0 – 1 000 per mil) low byte
1) With the bits 0 - 2 of byte 1, the operation commands are transmitted to the actuator. Only one of these bits may be set at any given time. If SETPOINT (remote
nominal) is set, the value of the nominal position (byte 3 and byte 4) is used.
Bits 4 - 7 of byte 1 are reserved for future extensions and all bits of byte 2 must remain set to 0.
2) The nominal position has to be transmitted as a value between 0 to 1,000 per mil. When these limits are exceeded the actuator
stops and signals the fault “
WRONG COMMAND”.
Continued on the next page
Process Output
 Loading...
Loading...








