www.baldormotion.com
4-4 Feedback MN1919
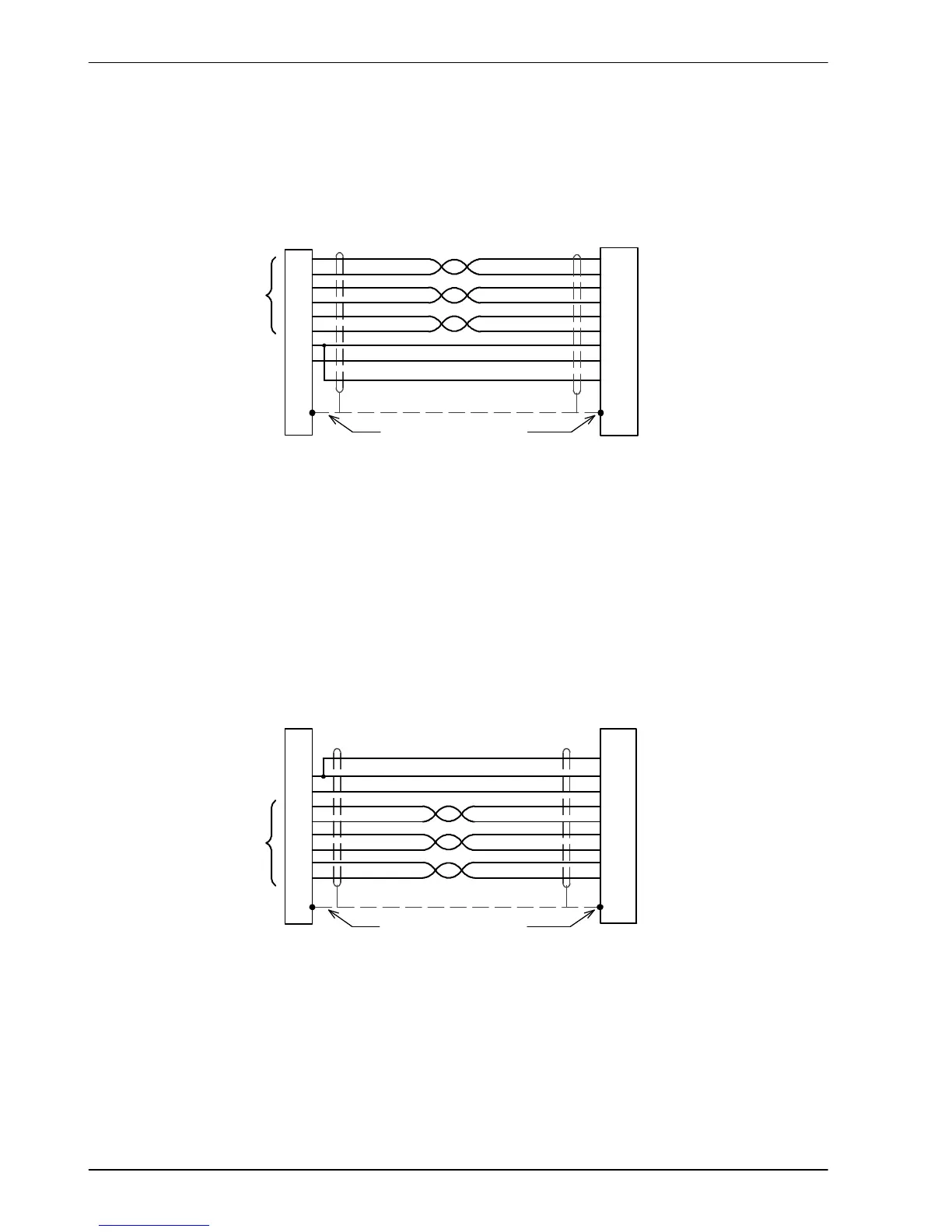
4.1.1.2 Encoders without Halls
Incremental encoders without Hall feedback connections may be connected to the MicroFlex.
However, if Hall connections are not present, it will be necessary for the MicroFlex to perform
an automatic phase search sequence each time it is powered. This will cause motor
movement of up to 1 turn on rotary motors, or one pole-pitch on linear motors.
CHA+
CHA-
CHB+
CHB-
+5V
DGND
1
9
2
10
3
11
12
X8
CHZ+ (INDEX)
CHZ- (INDEX)
13
4Sense
Connect overall shield
to connector backshells.
Twisted pairs
Encoder
Feedback
Motor
Figure 13 - Encoder cable connections without halls - rotary motors
4.1.1.3 Halls-only feedback devices
Feedback devices using only Hall sensors may be connected to the MicroFlex. However,
since there are no encoder connections, the MicroFlex will not be able to perform smooth
speed control or accurate positioning control.
+5V
DGND
12
X8
6
5
15
14
8
7
13
Hall U+
Hall U-
Hall W+
Hall W-
Hall V+
Hall V-
4 Sens e
Hall
Feedback
Connect overall shield
to connector backshells.
Motor
Figure 14 - Halls-only feedback cable connections - rotary motors
Note: If the Hall inputs are used as single ended inputs, leave the Hall U-, Hall V- and
Hall W- pins unconnected; do not connect them to ground.