Chapter 8 Logic Instructions
Bit string to Time and Date
The Bit-string data can be converted to the Time or Date data. And some instructions are
shown below.
The rule for the conversion of Bit-string data into Time or Date data is the same as that for the
conversion of the Bit-string data into unsigned integer data.
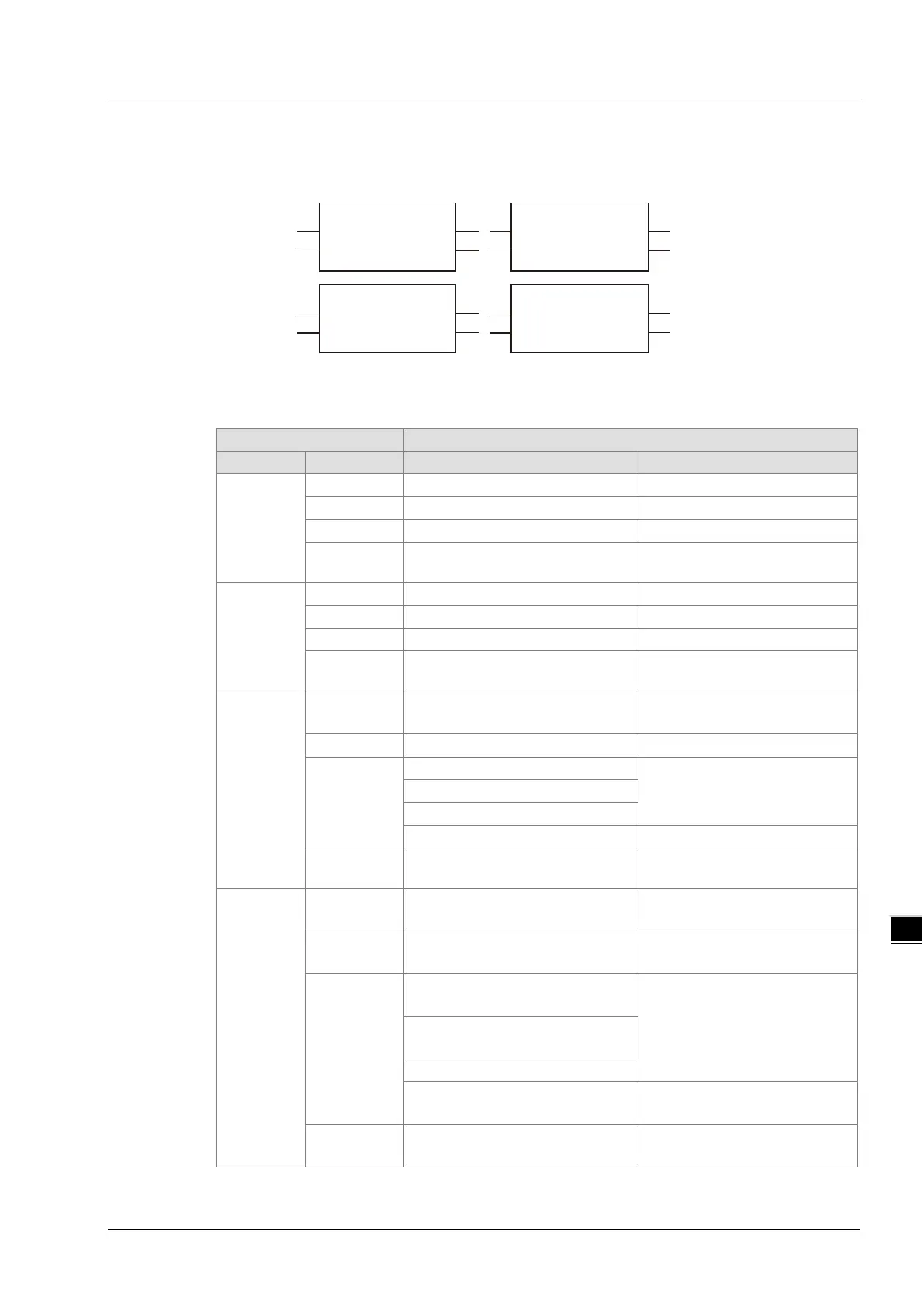
The Bit-string data are converted into the Time and Date data as the following table shows.
The value of In corresponds to the value of Out
BYTE
DT
DT#1970-1-1-0:0:0~
DT#1970
-1-1-0:4:15
WORD
DT
DT#1970-1-1-0:0:0~
DT#1970-1-1-18:12:15
DWORD
TIME
16#0000_0000~16#FFFF_FFFF
T#0ns~
T#4s294ms967us295ns
16#0000_0000~16#FFFF_FFFF
TOD
16#0000_0000~16#0526_5BFF
TOD#0:0:0~
TOD#23:59:59.999
16#0526_5C00~16#0A4C_B7FF
16#FC57_9C00~16#FFFF_FFFF
TOD#0:0:0~ TOD#17:2:47.295
DT
16#0000_0000~16#FFFF_FFFF
DT#1970-1-1-0:0:0~
DT#2016-2-7-6:28:15
LWORD
TIME
16#0000_0000_0000_0000~
16# FFFF_FFFF_FFFF_FFFF
T#213503d23h34m33s709ms5
51us615ns
DATE
16#****_****_0000_0000~
16#****_****_FFFF_FFFF
-1-1~D#2016-2-7
TOD
16#****_****_0000_0000~
16#****_****_0A4C_B7FF
TOD#0:0:0~
TOD#23:59:59.999
16#****_****_0526_5C00~
16#****_****_0A4C_B7FF
16#****_****_0000_0000~
16#****_****_FFFF_FFFF
TOD#0:0:0~ TOD#17:2:47.295
DT
16#****_****_0000_0000~
16#****_****_FFFF_FFFF
DT#1970-1-1-0:0:0~
DT#2016
-2-7-6:28:15
8-157