Chapter 4 System Architecture
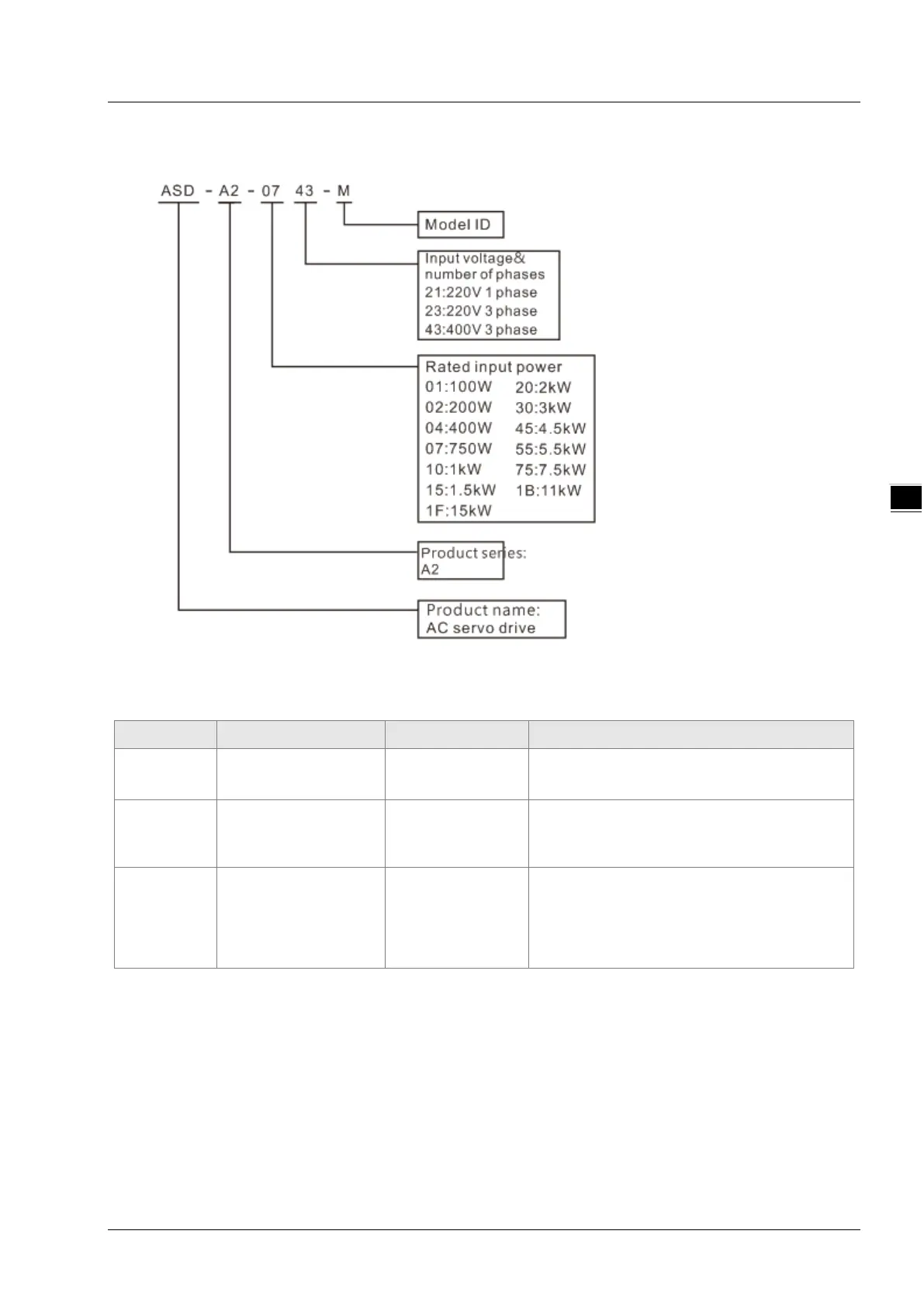
Illustration of the servo drive model
Relevant servo parameter settings are shown in the following table when DVP15MC11T and the
servo drive are connected.
Parameter Explanation Setting value Explanation
P1-01
Setting the control
mode of the servo
X0B*
1
Set as CANopen mode
P3-00
Setting a node ID
Setting range:
1~24
The setting of this parameter corresponds to
the node
address of the servo in the CANopen
network
P3-01
Baud rate
0403
The baud rate that the parameter value
corresponds to must be consistent with that of
DVP15MC11T.
0403: CANopen baud rate is 1Mbps
0203: CANopen baud rate is 500Kbps
*
1
:The output directions of the torque are illustrated as below when the value of X is 0 and 1 respectively.
4-5