Chapter 10 Motion Control Function
1
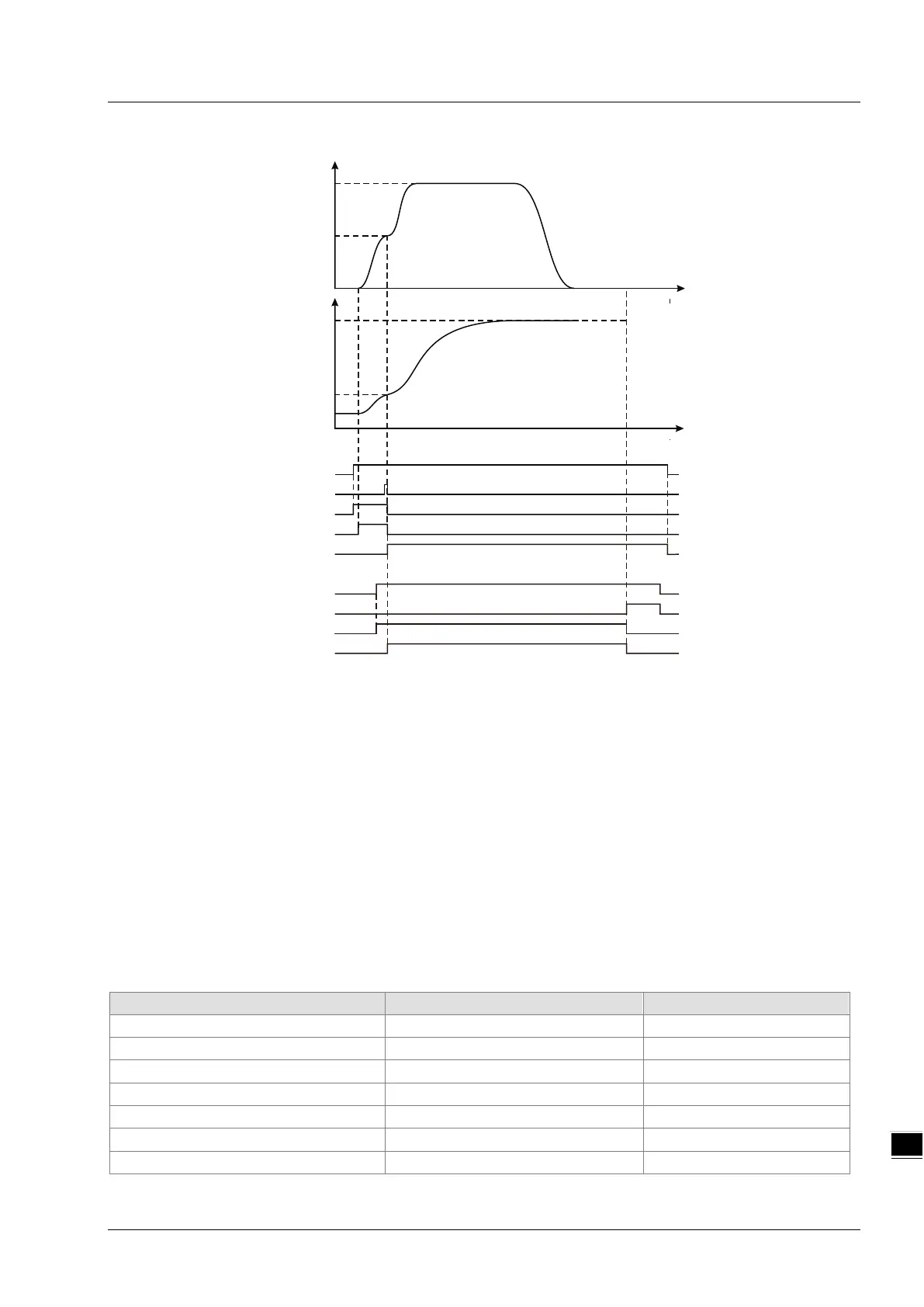
Rel_BM =mcBuffered
As Vel_Ex changes from FALSE to TRUE, Vel_Bsy changes to TRUE. One period later,
Vel_Act changes to TRUE. Rel_Ex changes from FASLE to TRUE when the target velocity is
not reached. The axis will not execute the MC_MoveRelatvie instruction till the velocity
instruction execution is completed. At the moment, Rel_Bsy changes to TRUE. When the
velocity instruction execution is completed, Vel_Invel changes to TRUE and one period later,
the MC_MoveRelatvie instruction starts to control the axis. Vel_Abt changes to TRUE and the
velocity instruction is aborted. Rel_Act is TRUE, which means that the MC_MoveRelative
instruction starts to control the motion of the axis. Rel_Done changes to TRUE as the
positioning is completed.
(The effect of Rel_BM = mcBlendingLow, mcBlendingPrevious, mcBlendingNext or
mcBlendingHigh is the same as that of Rel_BM = mcBuffered.)
Example 3
The example explains the axis states for different BufferMode value with a MC_MoveRelative instruction and
a MC_MoveVelocity instruction which is the buffered instruction.
The variable table and program
Vel_Vel
Rel_Dist
S
2
S
1
Rel_Vel
Vel_Ex
Vel_Invel
Vel_Bsy
Vel_Act
Vel_Abt
Velocity
Position
Time
Time
Vel
Rel_Ex
Rel_Bsy
Rel Act
Rel_Done
Rel
10-23