DVP15MC11T Operation Manual
3
2
1
Axis1
Stp_Ex
100.0
15.0
Stp_Done
Stp_Bsy
Stp_Act
Stp_Abt
Stp_Err
Stp_ErrID
Axis1
Pwr_EnPs
True
Pwr_BM
Pwr_Bsy
Pwr_Act
Pwr_Err
Pwr_ErrID
Pwr_En
Pwr_Sta
Axis1
300.0
100.0
100.0
15.0
Vel_Dir
Vel_BM
Vel_Bsy
Vel_Act
Vel_Abt
Vel_Err
Vel_ErrID
Vel_Ex
Vel_Invel
MC_Power
Axis Status
Pwr
Enable
EnablePositive
Busy
Active
EnableNegative
BufferMode
Error
ErrorID
MC_MoveVelocity
Axis Invelocity
Vel
Execute
ContinuousUpdate
Busy
Active
Velocity
Error
ErrorID
CommandAborted
Acceleration
Deceleration
Jerk
Direction
BufferMode
MC_Stop
Axis Done
Stp
Execute
Deceleration
Busy
Active
Jerk
Error
ErrorID
CommandAborted
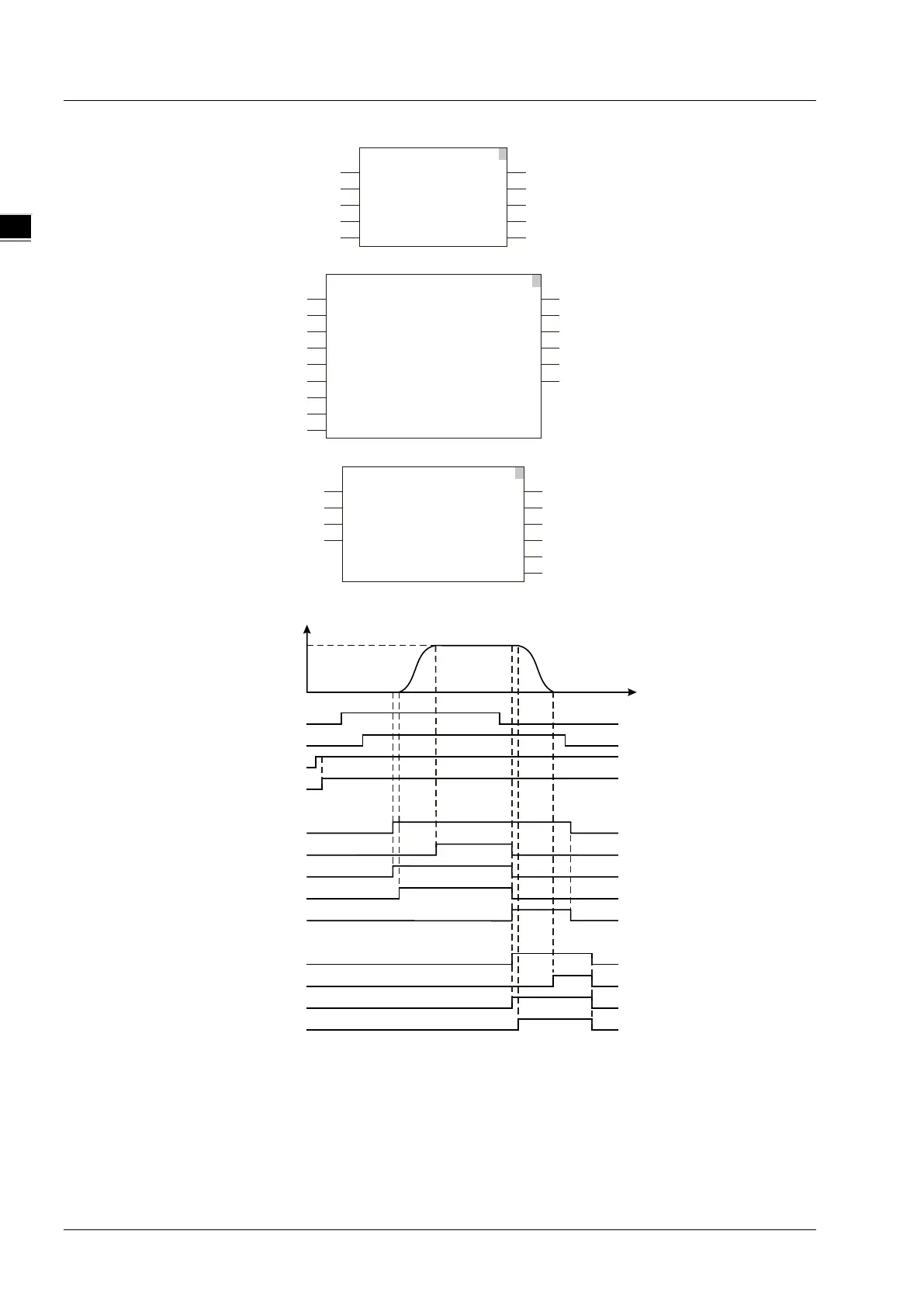
2. Motion Curve and Timing Chart
When Vel _Ex changes to TRUE, Vel _Bsy changes to TRUE; one cycle later, Vel _Act
changes to TRUE and the servo motor starts moving in the positive direction. When the speed
of the servo motor reaches the target velocity, Vel _Invel changes to TRUE.
When Pwr_En changes to FALSE, the axis will not enter the Standstill state immediately. When
Stp _Ex changes to TRUE, Stp _Bsy changes to TRUE; one cycle later, Stp _Act changes to
TRUE and the servo motor begins to decelerate. When the speed of the servo motor drops to 0,
300
Velocity
Time
Pwr_En
Pwr_Sta
Pwr_Act
Vel_Ex
Vel_Invel
Stp_Ex
Stp_Bsy
Stp_Act
Vel_Abt
Stp_Done
Vel_Bsy
Vel_Act
Pwr_Bsy
Pwr
Vel
Stp
11-12