DVP15MC11T Operation Manual
5. If another MC_MoveSuperimposed instruction is executed when one MC_MoveSuperimposed
instruction controls the axis independently, the previous MC_MoveSuperimposed instruction will be
aborted.
6. If the MC_HaltSuperimposed instruction is executed in the course of execution of
MC_MoveSuperimposed instruction, the MC_MoveSuperimposed instruction will be aborted.
7. MC_MoveSuperimposed can be executed on the slave axis specified by MC_GearIn instruction and
MC_ CamIn instruction.
Programming Example 1
The programming example is as follows when one MC_MoveSuperimposed instruction is used.
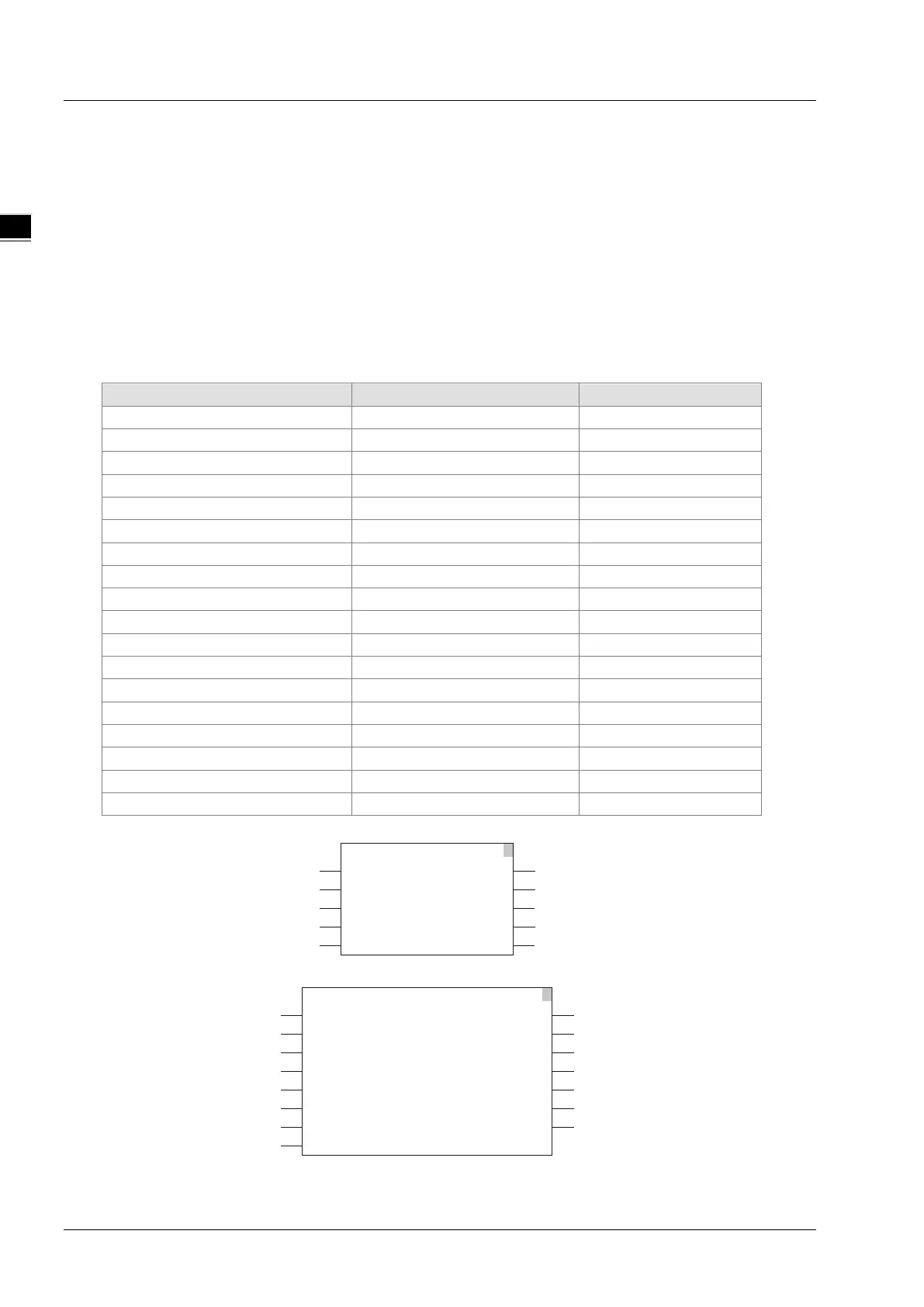
1. The variable table and program
Sup_Abt BOOL
2
1
Sup_Bsy
Sup_Act
Sup_Abt
Sup_Err
Sup_ErrID
Sup_Done
Sup_Distan
Axis1
5000.0
300.0
100.0
100.0
15.0
Sup_Ex
MC_MoveSuperimposed
Axis Done
Sup
Execute
ContinuousUpdate
Busy
Active
Distance
Error
ErrorID
CommandAborted
Acceleration
Deceleration
Jerk
Velocity
CoveredDistance
Axis1
True
True
Pwr_BM
Pwr_Bsy
Pwr_Act
Pwr_Err
Pwr_ErrID
Pwr_En
Pwr_Sta
MC_Power
Axis Status
Pwr
Enable
EnablePositive
Busy
Active
EnableNegative
BufferMode
Error
ErrorID
11-64