Chapter 12 Troubleshooting
1
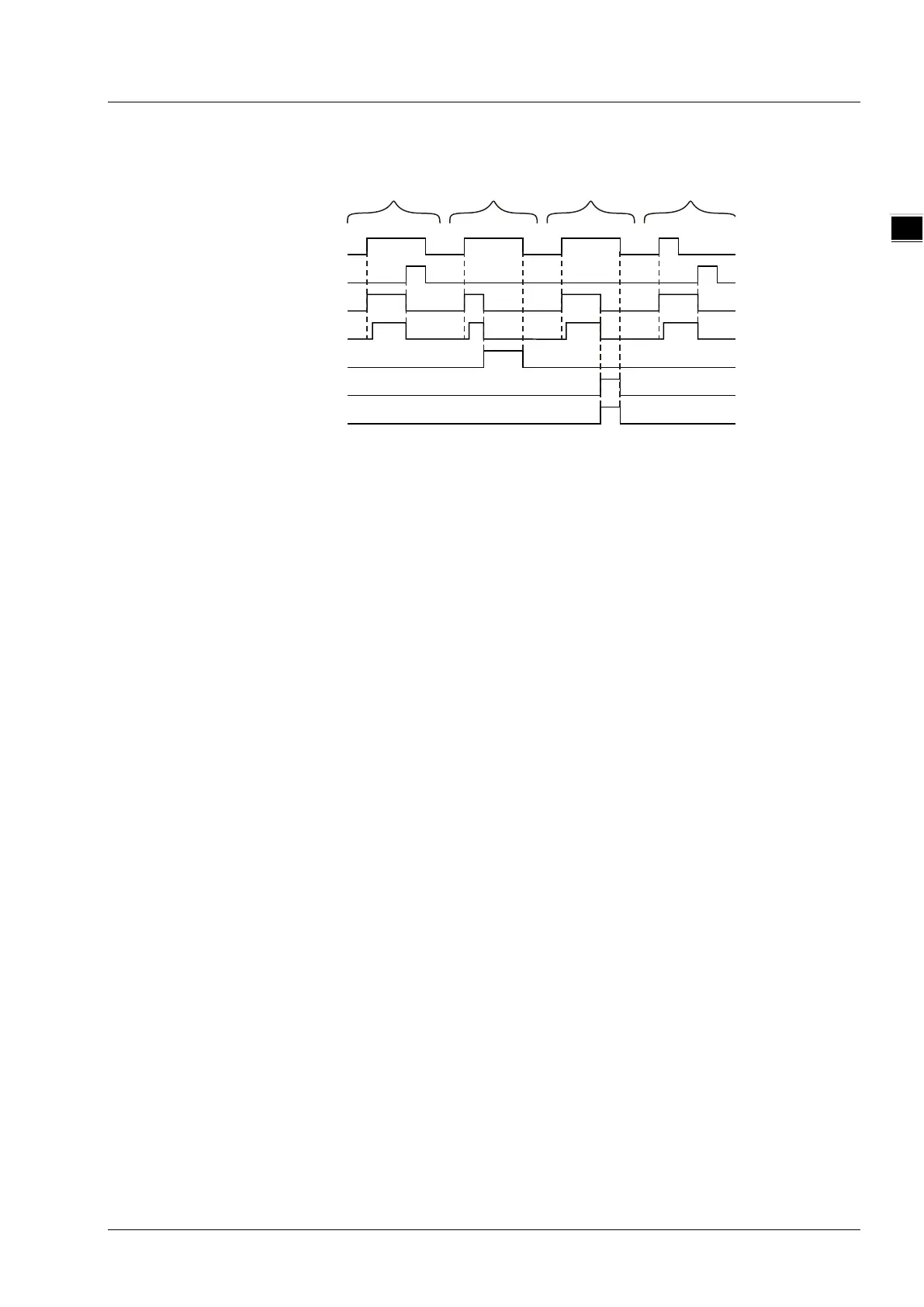
Output Update Timing Chart
Case 1: When Execute changes from FALSE to TRUE, Busy changes to TRUE. One cycle later, Active
changes to TRUE. When the instruction execution is completed, Done changes to TRUE and
Busy and Active change to FALSE.
Case 2: When Execute changes to TRUE and the instruction is aborted by other instruction,
CommandAborted changes to TRUE and meanwhile, Busy and Active change to FALSE.
CommandAborted changes to FALSE when Execute changes from TRUE to FALSE.
Case 3: When an error occurs such as disabled axis as Execute is TRUE, Error changes to TRUE and
ErrorID shows corresponding error code. Meanwhile, Busy and Active change to FALSE. Error
changes to FALSE and the value of ErrorID is cleared to 0 when Execute changes from TRUE
to FALSE.
Case 4: Done changes to TRUE when the instruction execution is completed after Execute changes
from TRUE to FALSE during execution of the instruction. Meanwhile, Busy and Active change
to FALSE and one cycle later, Done changes to FALSE.
Function
The MC_MoveSuperimposed instruction controls the axis to independently superimpose the set distance
on the current motion state according to the set velocity, acceleration and deceleration.
1. When MC_MoveSuperimposed instruction is executed, the execution of the previous instruction
excluding MC_MoveSuperimposed and MC_HaltSuperimposed instructions is not aborted. If the
two instructions are executed simultaneously, their distances, velocities, accelerations and
decelerations will be respectively added up in real time. When the set velocity of either of the
instructions is reached, the acceleration of the instruction will be 0. If the previous instruction
execution is finished, the velocities, accelerations and decelerations will not be added up any more
and MC_MoveSuperimposed instruction continues running independently.
2. If MC_MoveSuperimposed instruction is executed when the axis is in Standstill state, the execution
effect of MC_MoveSuperimposed instruction is equivalent to that of MC_MoveRelative instruction.
3. Execute another motion instruction excluding MC_MoveSuperimposed and MC_HaltSuperimposed
instructions when MC_MoveSuperimposed instruction and one motion instruction jointly control the
axis. If the Buffermode value of the lately executed motion instruction is 0, both of the
MC_MoveSuperimposed instruction and the previously executed motion instruction will be aborted.
If the Buffermode value of the lately executed motion instruction is another number except 0, the
MC_MoveSuperimposed instruction and the previously executed motion instruction will not be
aborted.
4. If another MC_MoveSuperimposed instruction is executed when one MC_MoveSuperimposed
instruction and another motion instruction jointly control the axis, the previous
MC_MoveSuperimposed instruction will be aborted but other motion instruction will not be affected.
Execute
Done
Busy
Active
CommandAborted
Error
Case 1
Case 2 Case 3 Case 4
Error ID
11-63