DVP15MC11T Operation Manual
3. Refer to section 10.2 for the relation among Velocity, Acceleration, Deceleration and Jerk.
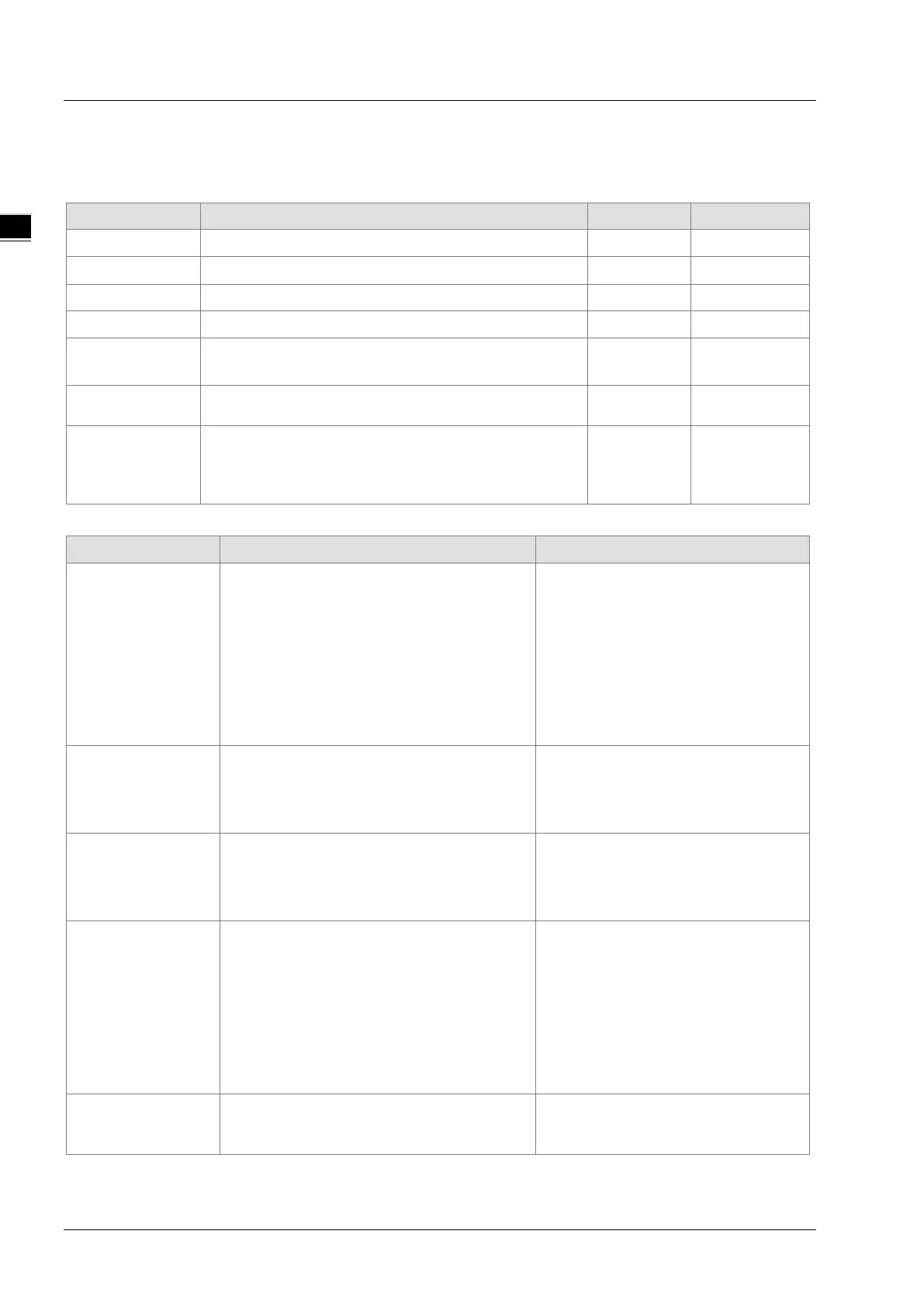
Output Parameters
Parameter name Function Data type Valid range
Done TRUE when the instruction execution is completed. BOOL TRUE / FALSE
Busy TRUE when the instruction is being executed. BOOL TRUE/FALSE
Active TRUE when the axis is being controlled. BOOL TRUE / FALSE
CommandAborted
TRUE when the instruction is aborted. BOOL TRUE / FALSE
Error
TRUE when an error occurs in execution of the
BOOL TRUE / FALSE
ErrorID
Contains the error code when an error occurs. Please
refer to section 12.2 for the corresponding error ID.
WORD -
CoveredDistance
The totally
superimposed distance since the instruction
is started.
LREAL
number,
Output Update Timing
Parameter Name Timing for changing to TRUE Timing for changing to FALSE
Done
When the superimposed positioning is
completed.
When Execute changes from
TRUE to FALSE after the
instruction execution is completed.
Done changes to TRUE when the
instruction execution is completed
after Execute changes from TRUE
to FALSE during the instruction
execution. One cycle later, Done
Busy When Execute changes to TRUE.
When Done changes to TRUE.
When Error changes to TRUE.
When CommandAborted changes
Active
When the instruction starts to control the
axis.
When Done changes to TRUE.
When Error changes to TRUE.
When CommandAborted changes
CommandAborted
When
this instruction execution is aborted
by other motion control instruction.
When Execute changes from
TRUE to FALSE
CommandAborted is set to TRUE
when the instruction is aborted
after Execute changes from TRUE
to FALSE during the instruction
execution. One cycle later,
CommandAborted changes to
Error
When an error occurs in the instruction
execution or the input parameters for the
When Execute changes from
TRUE to FALSE
11-62