DVP15MC11T Operation Manual
2. Motion Curve and Timing Chart
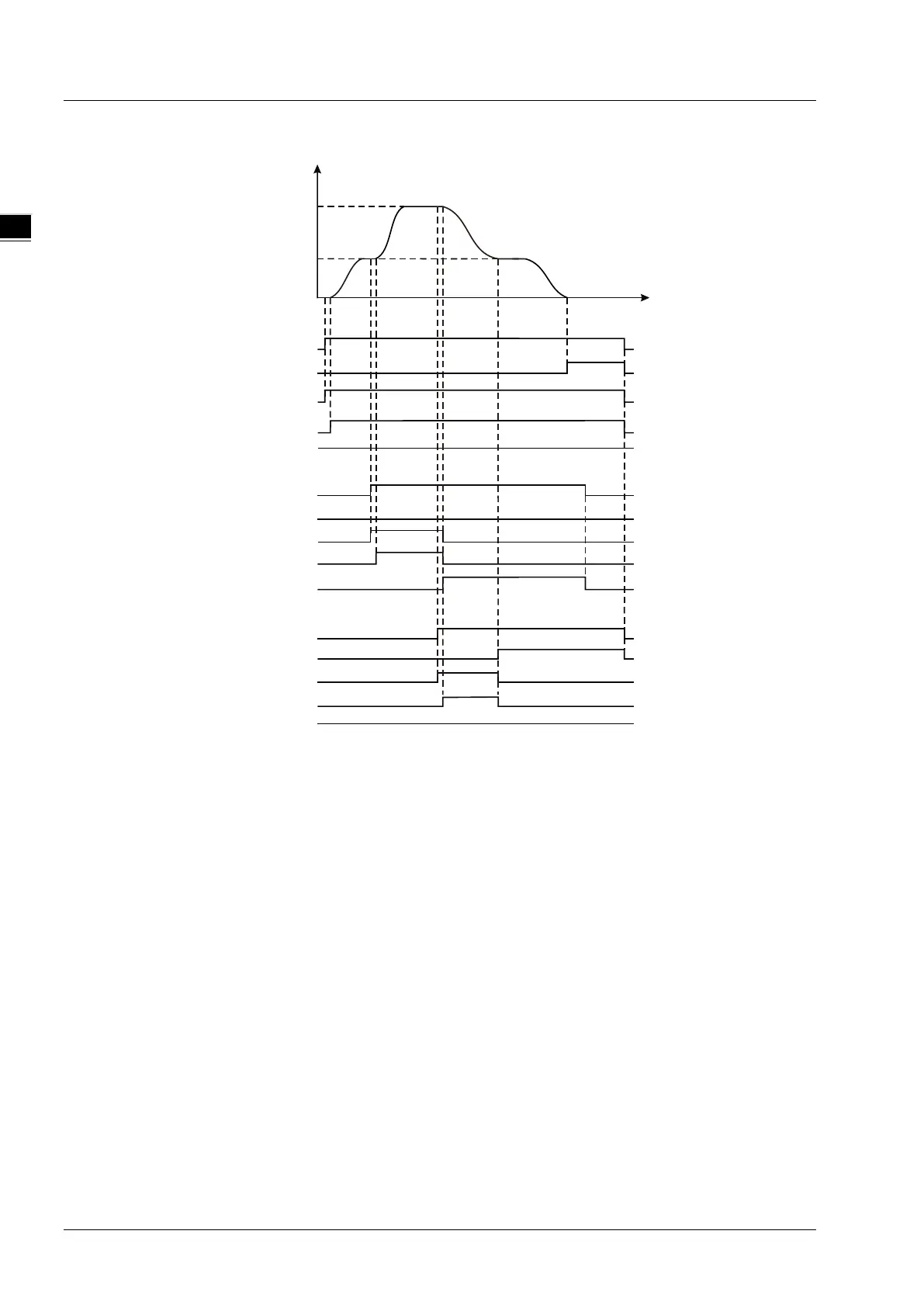
When Rel_Ex changes to TRUE, Rel_Bsy changes to TRUE. One cycle later, Rel_Act changes
to TRUE and the motion controller controls the servo motor rotation by using the current
position as the reference point. When Sup_Ex changes to TRUE, Sup_Bsy changes to TRUE.
One cycle later, Sup_Act changes to TRUE, the execution of the MC_MoveSuperimposed
instruction starts and the velocities and accelerations (0 at the moment) for the servo motor will
be added up respectively.
When Hltsup_Ex changes to TRUE, Hltsup_Bsy changes to TRUE. One cycle later, Hltsup_Act
changes to TRUE, the execution of the MC_HaltSuperimposed instruction starts, the
MC_MoveSuperimposed instruction is aborted and Sup_Bsy and Sup_Act change to FALSE
and meanwhile, Sup_Abt changes to TRUE. The execution of the MC_MoveSuperimposed
instruction is halted by the MC_HaltSuperimposed instruction.
When Hltsup_Done changes to TRUE, Hltsup_Bsy and Hltsup_Act change to FALSE.
The execution of the MC_HaltSuperimposed instruction has no impact on the being executed
MC_MoveRelative instruction.
500
1100
Rel_Ex
Sup_Ex
Sup_Done
Rel_Abt
Rel_Bsy
Sup_Bsy
Sup_Act
Sup_Abt
Velocity
Time
Sup
Rel
HltSup_Ex
HltSup_Done
HltSup_Abt
HltSup_Bsy
HltSup
Rel_Done
Rel_Act
HltSup_Act
11-72