DVP15MC11T Operation Manual
2. Motion Curve and Timing Charts:
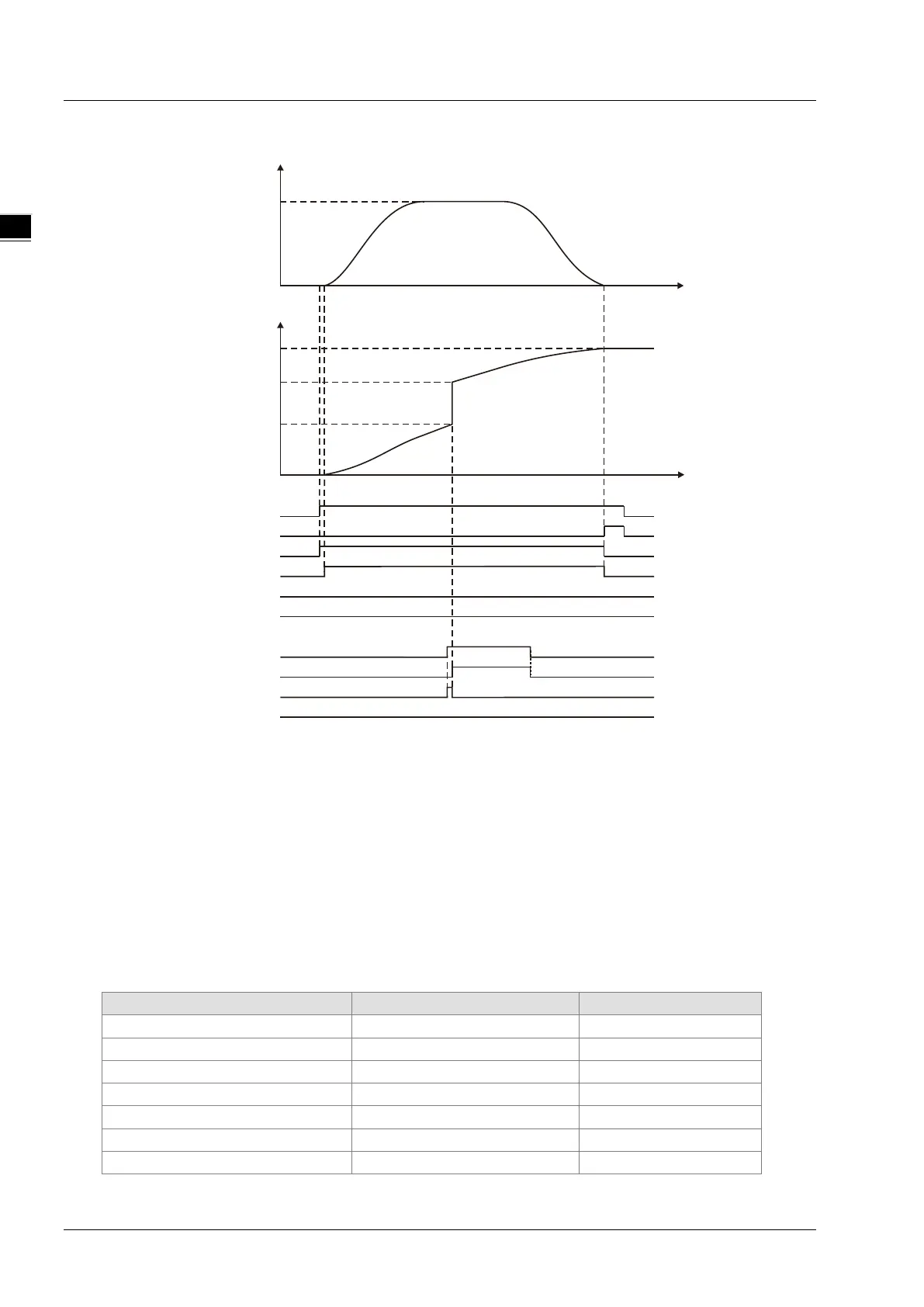
As Rel_Ex changes from FALSE to TRUE, the execution of MC_MoveRelative instruction is
started and MC_SetPosition is executed 3 seconds later after MC_MoveRelative is executed.
The command position is 6000 as MC_SetPosition starts being executed and 11000
(11000=6000+5000) after the instruction execution ends. The position is 15000 as
MC_MoveRelative execution ends.
MC_SetPosition does not affect the motion which is being performed through observing the
above velocity change curve.
Programming Example 2
The following example describes the impact of MC_SetPosition execution on the axis position when
Relative of MC_SetPosition instruction is FALSE (the absolute mode is chosen for MC_SetPosition).
1. The variable table and program
Rel
3000
6000
11000
15000
Rel_Ex
Rel_Done
Rel_Bsy
Rel_Act
Rel_Abt
Rel_Err
SetPos Err
SetPos_Ex
SetPos_Done
SetPos_Bsy
SetPos
Velocity
Position
Time
Time
11-78