Chapter 12 Troubleshooting
1
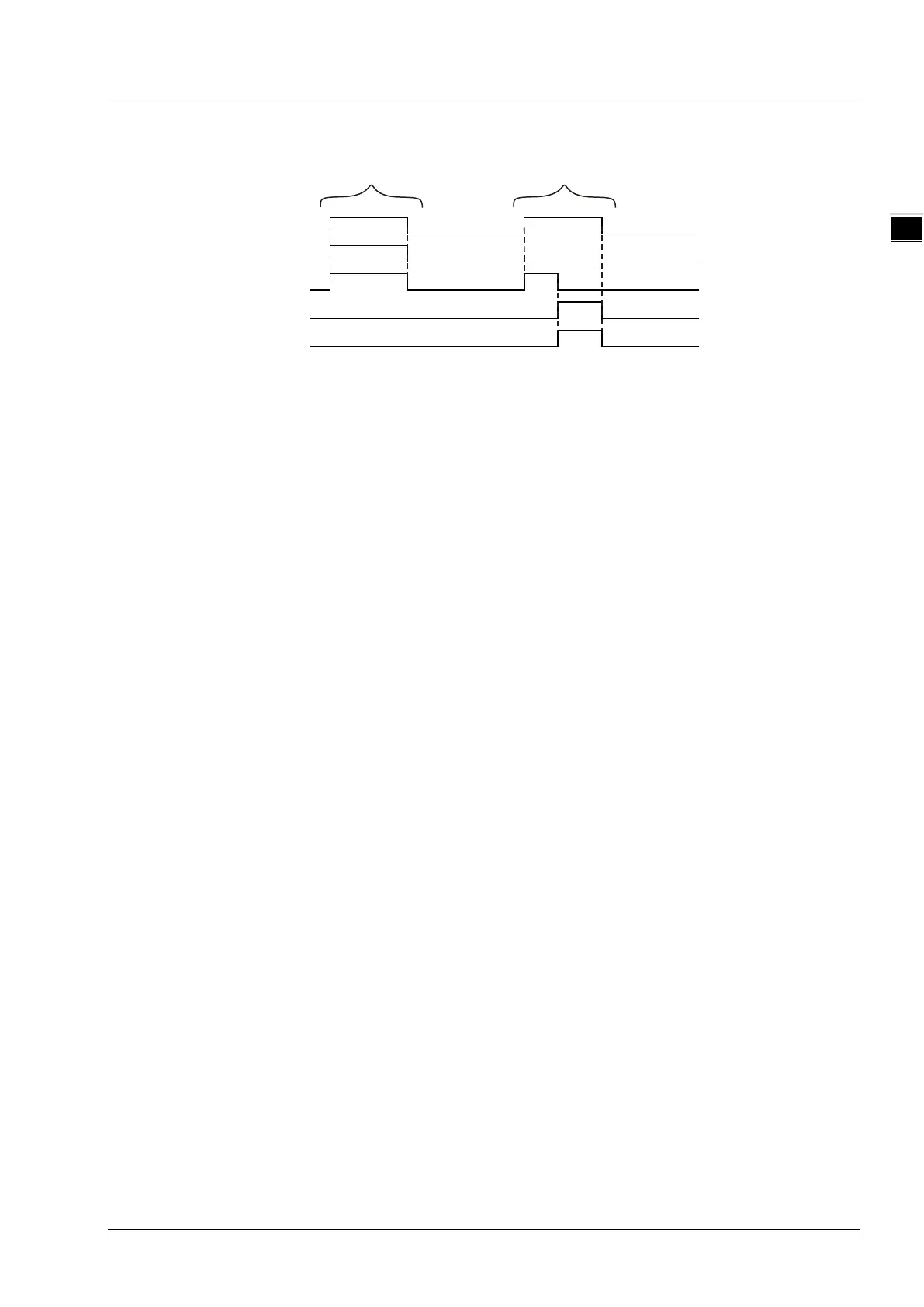
Output Update Timing Chart
En able
Valid
Busy
Error
Error ID
Case 1 Case 2
Case 1: When Enable changes from FALSE to TRUE, Valid and Busy change to TRUE. When Enable
changes to FALSE, Valid and Busy change to FALSE.
Case 2: When an error occurs, Error changes to TRUE and ErrorID shows corresponding error code.
Meanwhile Busy changes to FALSE. When Enable changes from TRUE to FALSE, Error
changes to FALSE and the value of ErrorID is cleared.
Function
MC_ReadAxisError is used to read error information of a servo axis such as the alarm code which will
show up on the panel of the servo drive and servo axis offline. The instruction is triggered by the high
level. Axis errors will be read when Valid is TRUE.
11-95