Chapter 12 Troubleshooting
1
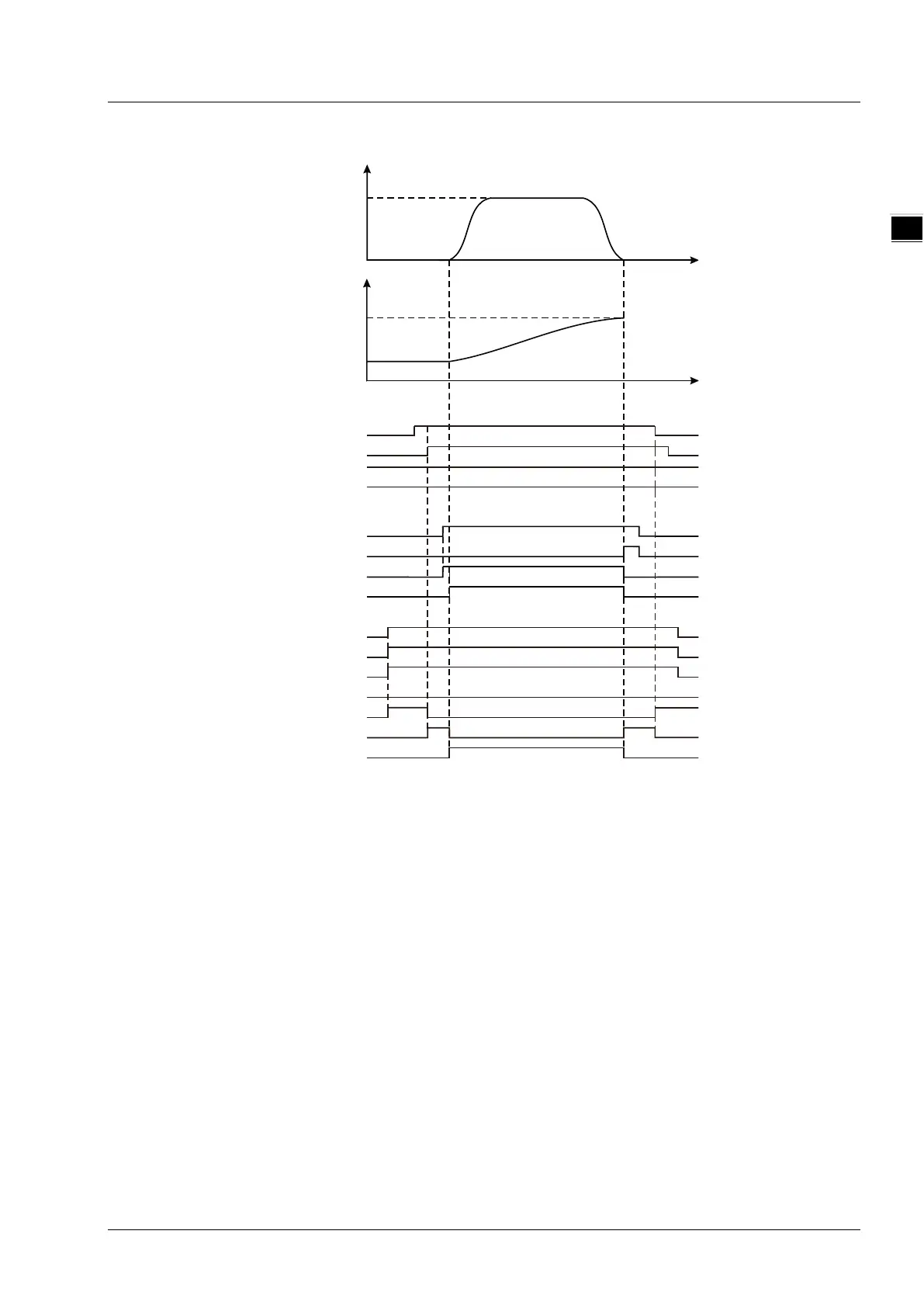
2. Motion Curve and Timing Charts:
ReadSt_Vald, ReadSt_Bsy and ReadSt_Disbl change to TRUE as ReadSt_En changes from
FALSE to TRUE.
When Pwr_Sta changes from FALSE to TRUE, ReadSt_Stans changes to TRUE,
ReadSt_Disbl changes to FALSE and the state of the axis changes from Disabled to Standstill.
The motion controller controls the servo motor to move by starting from current position as
Rel_Act changes from FALSE to TRUE. Meanwhile ReadSt_Stans changes to FALSE and
ReadSt_Dism changes to TRUE. When the servo motor moves the target distance, Rel_Done
and ReadSt_Stans change to TRUE; Rel_Bsy, Rel_Act and ReadSt_Dism change to FALSE.
Rel_Done also changes to FALSE as Rel_Ex changes to FALSE.
When Pwr_En changes to FALSE, ReadSt_Disbl changes to TRUE, ReadSt_Stans changes to
FALSE and several cycles later Pwr_Sta also changes to FALSE.
When ReadSt_En changes to FALSE, ReadSt_Vald and ReadSt_Bsy change to FALSE and
ReadSt_Disbl remains TRUE.
300
2000
7000
Rel_Ex
Rel_Done
Rel_Bsy
Rel_Act
Position
Velocity
Time
Time
Pwr_En
Pwr_Sta
Pwr_Bsy
Pwr_Act
ReadSt_Vald
ReadSt_Bsy
ReadSt_Err
ReadSt_Disbl
ReadSt_Stans
ReadSt Dism
Pwr
Rel
ReadSt
ReadSt_En
11-105