Chapter 12 Troubleshooting
1
Programming Example 2
Capture the position converted from the number of pulses that the servo motor feeds back to the servo
drive according to axis parameters when the external signal triggers DI7 of servo’s CN1 under Mode 2.
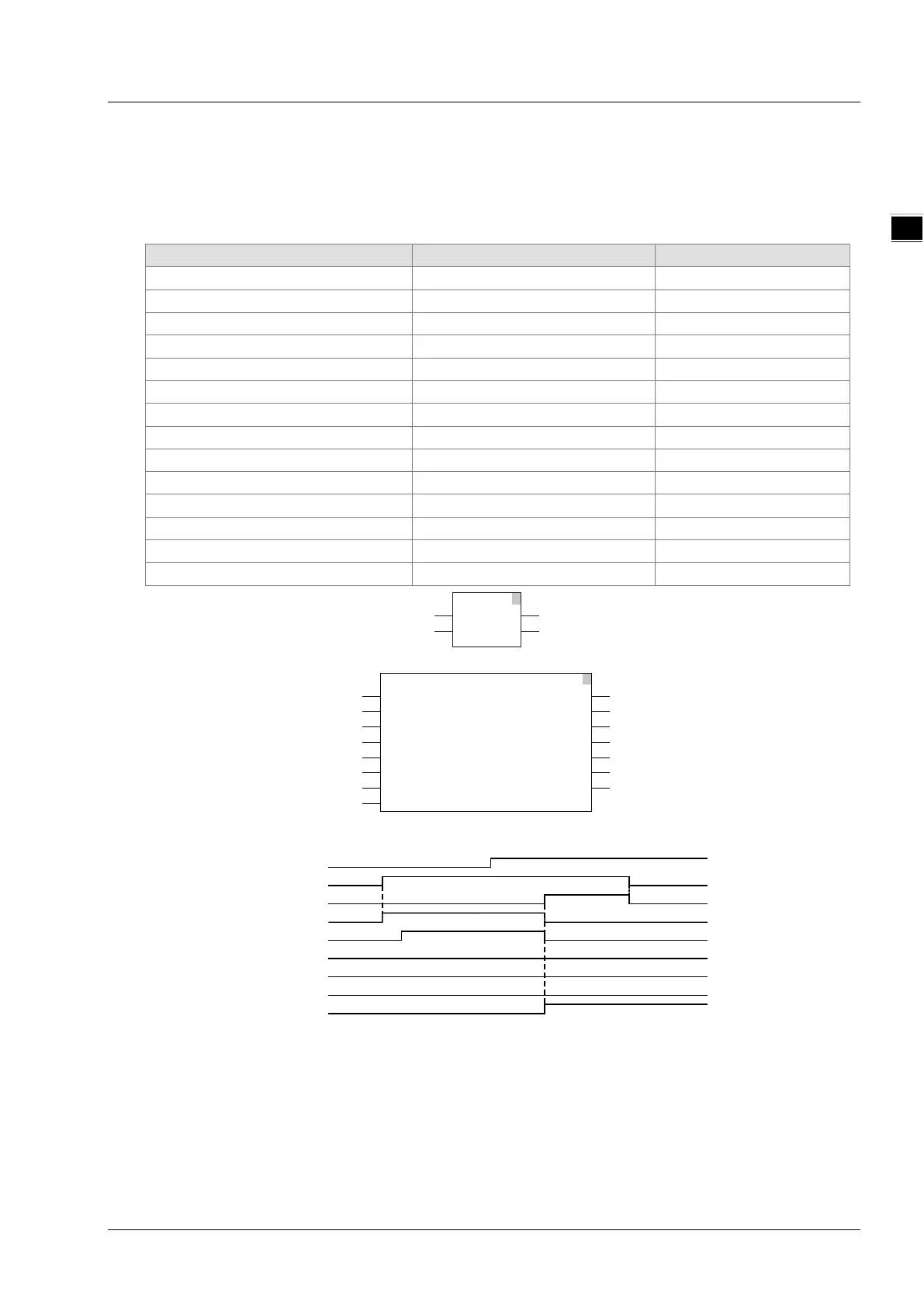
1. The variable table and program
1
2
NOT
EN ENO
In Out
NOT_EN
Touch1_Done
NOT_ENO
Touch1_Ex
DMC_TouchProbe
Axis Done
Touch1
Execute
Trigg erInput
Busy
Active
Windowonly
Error
ErrorID
CommandAborted
Firstpos
Lastpos
Mode
Mask
RecordedPosition
Axis2
Touch1_Tri
Touch1_Ex
Touch1_Mode
Touch1_Done
Touch1_Pos
Touch1_ErrID
Touch1_Err
Touch1_Abt
Touch1_Act
Touch1_Bsy
2. Timing Chart
Di7 of servo’s CN1
Touch1_Ex
Touch1_Done
Touch1_ Bsy
Touch1_Act
Touch1 _Abt
Touch1_Err
Touch1_ErrID
Touch1_Pos
When Touch1_Ex changes from FALSE to TRUE, Touch1_Bsy changes from FALSE to TRUE
in the first cycle and Touch1_Act changes from FALSE to TRUE in the second cycle.
When the execution of DMC_TouchProbe is finished after the external signal triggers DI7 of
servo’s CN1, Touch1_Done changes from FALSE to TRUE and Touch1_Pos outputs the
position converted from the number of pulses which the servo motor feeds back to the servo
drive according to the axis parameters. Meantime Touch1_Bsy and Touch1_Act change from
TRUE to FALSE. When Touch1_Ex changes from TRUE to FALSE, Touch1_Done changes
from TRUE to FALSE and the position that Touch1_Pos captures will not be cleared to 0.
11-127