DVP15MC11T Operation Manual
Timing for changing to TRUE
Timing for changing to FALSE
Error
When an error occurs in the
instruction execution or the input
parameters for the instruction are
When Execute changes from TRUE to
FALSE.
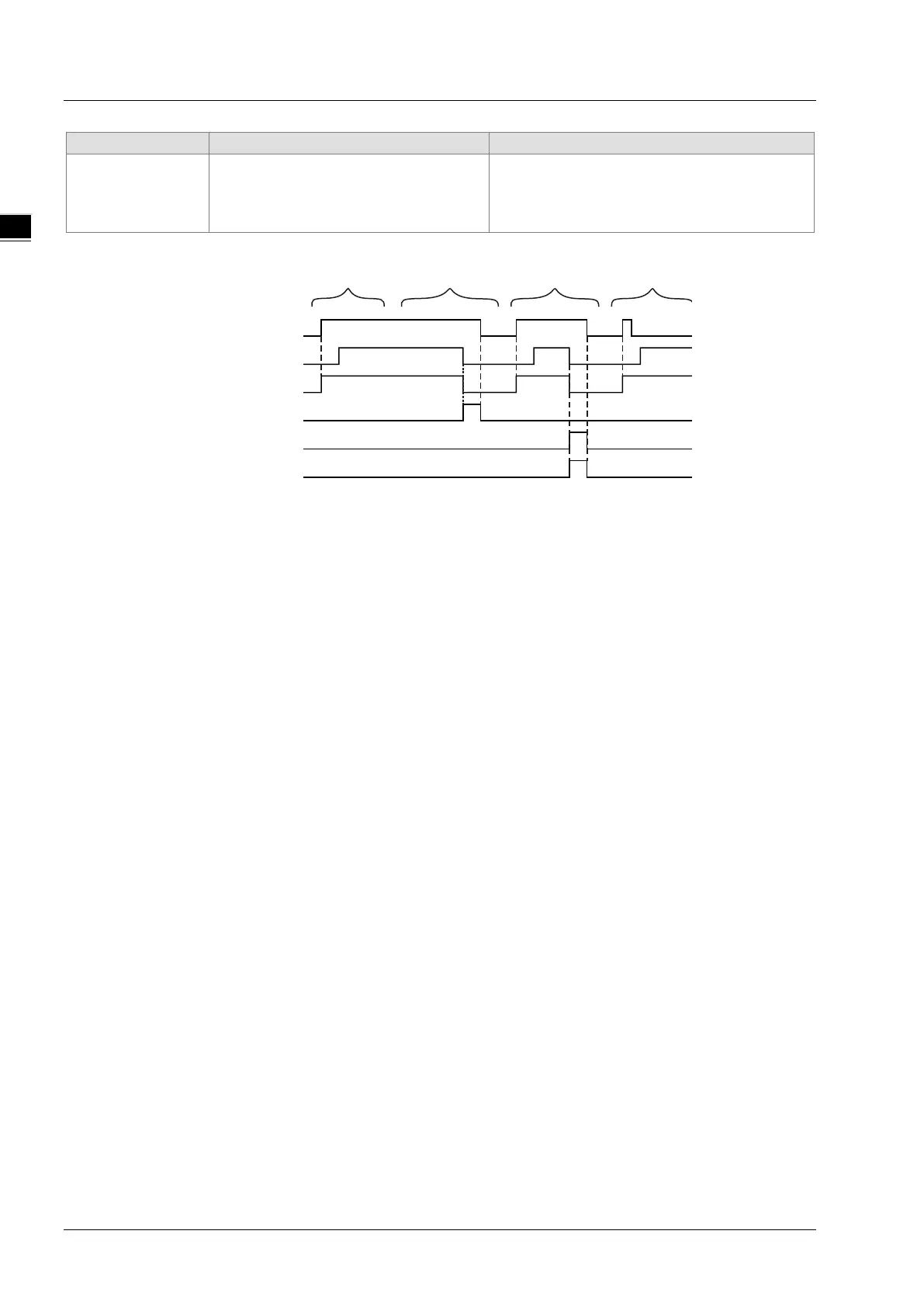
Output Update Timing Chart
Case 1: Busy changes to TRUE as Execute changes from FALSE to TRUE. One period later, Done
changes to TRUE. Busy and Done remain TRUE after Execute changes from TRUE to FALSE.
Case 2: When Execute is TRUE, CommandAborted changes to TRUE and meanwhile Busy and Done
change to FALSE if the instruction is aborted by other instruction. When Execute changes from
TRUE to FALSE, CommandAborted changes to FALSE.
Case 3: As Execute changes from FALSE to TRUE and an error occurs (e.g. an axis is disabled), Error
changes to TRUE and ErrorID shows corresponding error codes. Meanwhile Busy and Done
change to FALSE. As Execute changes from TRUE to FALSE, Error changes to FALSE.
Case 4: Execute changes from TRUE to FALSE as the instruction execution lasts for less than one
period. After that, Done changes to TRUE and Busy remain TRUE as one period is reached.
Functions
MC_CamOut is used for disconnecting the established electronic cam relationship. The instruction works
on the slave axis in the cam operation and the slave axis will continue moving at the speed of when it is
disconnected from the cam relationship.
MC_Halt or MC_Stop instructions can be executed on the slave axis so as to stop the slave axis motion.
The slave axis will stop moving and the cam relationship will be disconnected after the execution of the
MC_Halt instruction or MC_Stop instruction is completed.
Execute
Done
Busy
CommandAborted
Error
Error ID
Case 1
Case 2
Case 4
Case 3
11-170