Chapter 12 Troubleshooting
1
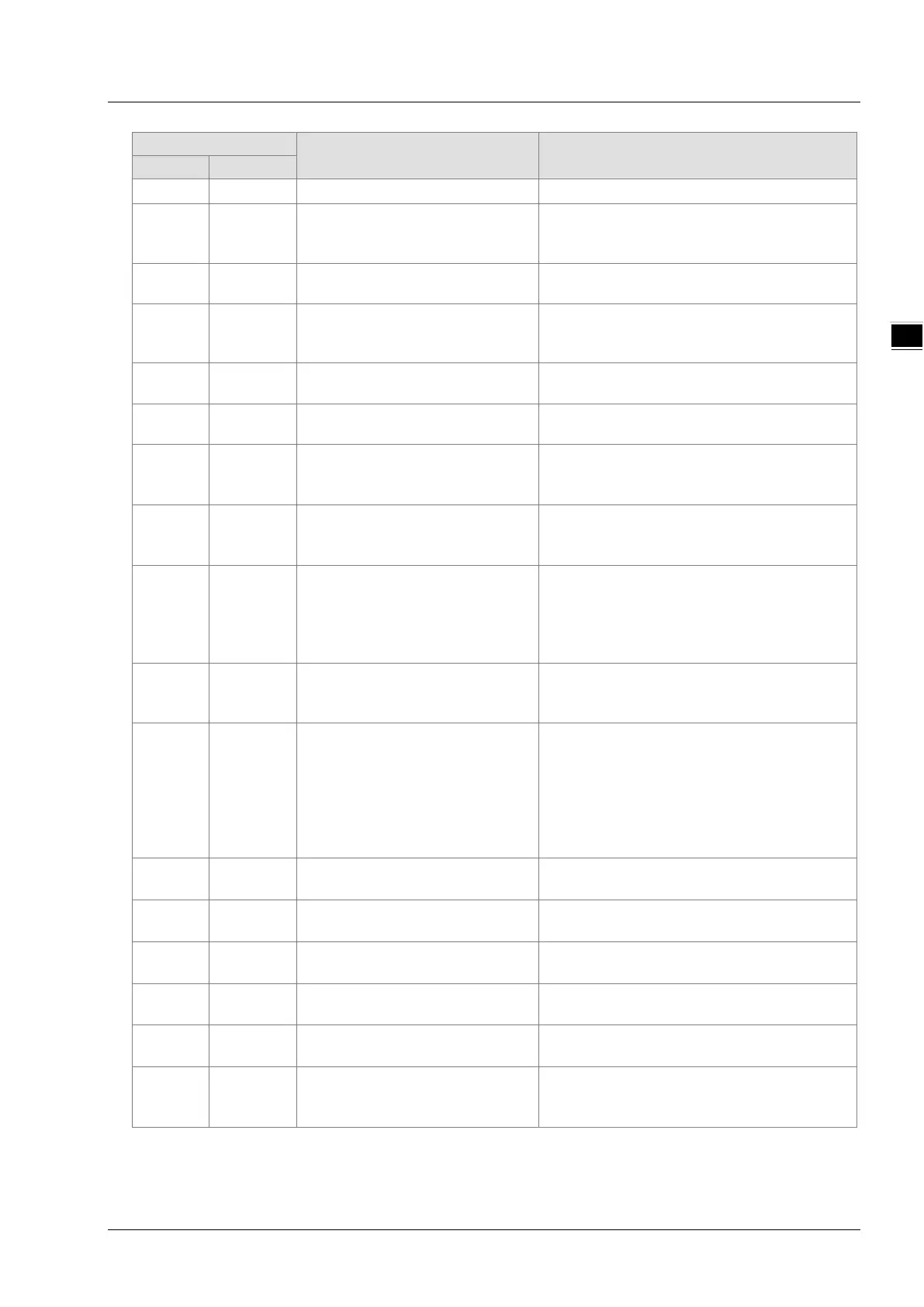
Meaning How to deal with
0x1048 4168
An error in the number of CR
registers which are read and written
by From/To.
Check if the value of Num
1~64.
0x1049 4169
The input variable of the instruction is
The input variable of the instruction must be set.
0x104A 4170
No response transmitted to From/To
instruction
Check if the connection between modules is
proper and if the extension module works
normally.
0x104B 4171 Empty CNC file
Check if the value of NCFile is correct and the
corresponding CNC file is empty.
0x104C 4172 CNC file analysis error
Check if there is any error in the CNC file
compiling.
0x2001 8193
The axis is disabled by means of
MC_Power instruction when it is not
in Standstill state.
Make the axis disabled by using MC_Power
instruction when the axis is in Standstill state.
0x2002 8194
The instruction cannot be executed
due to the limitation of the motion
Set EnablePositive and EnableNegative of
MC_Power to TRUE to cancel the limitation of the
motion direction of the axis.
0x2004 8196
MC_HaltSuperimposed cannot be
performed when
MC_MoveSuperimposed is not
executed yet.
Modify the sequence of execution of
MC_HaltSuperimposed. The execution of
MC_HaltSuperimposed should be conducted in
the process of performing
0x2100 8448
The state machine limits that the
function cannot be performed.
Modify the timing for execution of the instruction.
Refer to the state machine in section 10.4 for the
execution of motion instructions.
0x2101 8449 The buffer register is full.
The BufferMode of a motion control instruction
only supports one switch for changing the time to
execute current instruction and avoiding the
circumstance that another instruction is also
waiting to execute (BufferMode is not 0) while one
instruction is waiting to execute (BufferMode is not
0x2102 8450
Buffer function cannot be performed
The instruction cannot be operated in BufferMode.
0x3001 12289 An error in axis type setting
Modify the axis type on the axis configuration
0x3002 12290 Servo alarm
Have the control over the servo after clearing the
0x3003 12291 Servo Timeout
Check if the connection between the controller
and servo is OK.
0x3004 12292
The command position exceeds the
limit position set in the software.
Check if the set software limit position is proper or
disable the software limit position.
0x3005 12293
The process from RUN to STOP
occurs in the controller (during the
execution of a motion instruction)
Clear the error with the MC_Reset instruction and
then execute other motion instruction.
12-11