51
EN
IP2163EN
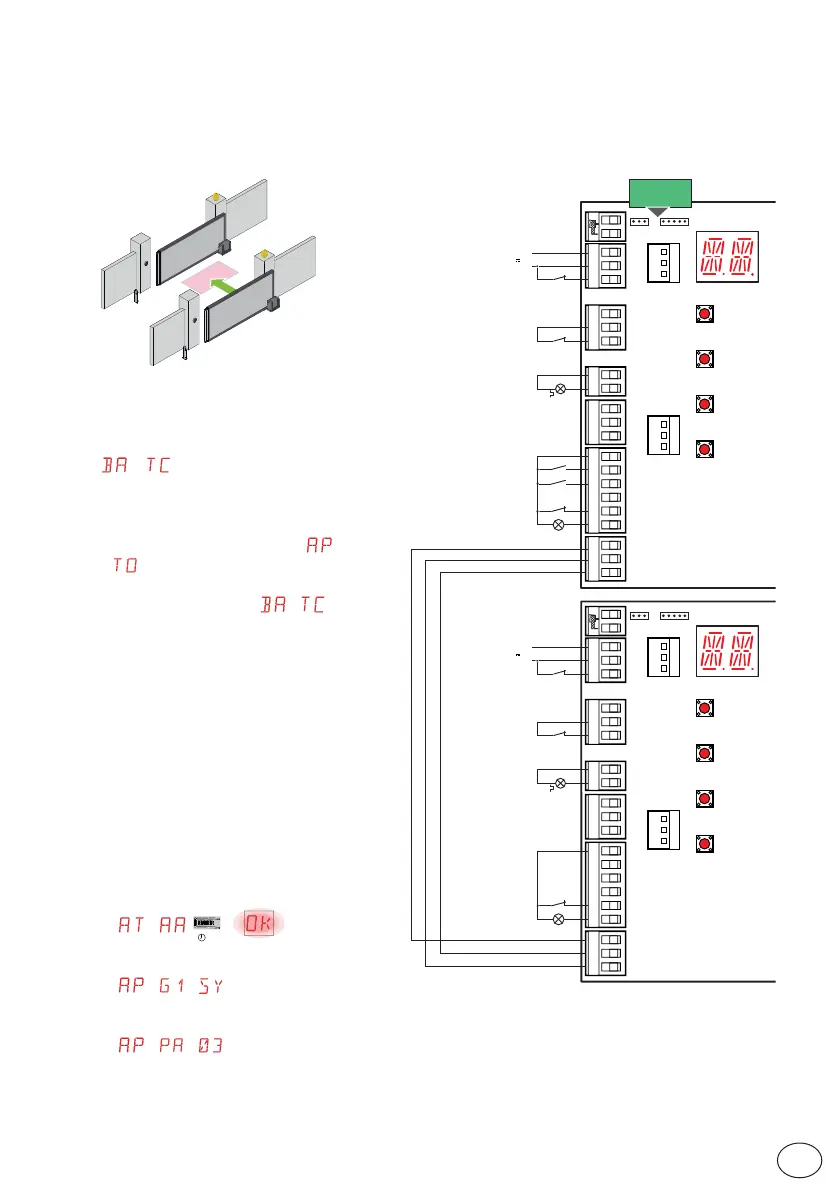
14. Examples of application for interlocked
one-way transit automations with presence
detection
With these settings, command
1-3 starts an opening operation
of the MASTER automation which
will close after the time set with
> only when the vehicle
activates the detection device in-
stalled between the two automa-
tions (e.g. magnetic loop).
Once the delay time set with
> has elapsed, the SLAVE au-
tomation will open and will close
after the time set with > .
Commands 1-5, 1-4 and 1-20 can
be used in special cases, for exam-
ple, to allow very long vehicles to
pass through.
Command 1-9 can interrupt the
interlock sequence, i.e., cancel
the command given to the SLAVE
automation.
1. Disconnect connectors 1-G1-
G3 from the control panels.
2. Set the following parameters on
both automations via the display:
Setting advanced parameters
>
→
2”
Setting input mode
> >
Setting automation parallel
mode
> >
With this setting the SLAVE automation will not close until contact 1-2 of the MASTER automa-
tion is activated.
A
B
UP
DOWN
AUX
ENTER
ESC
016 0 1 1 1
G1 G3
234913520
+LP-
18
RDX
Opening
Automatic external closing
activated by presence detection device
Stop
-
+
24V output
Safety stop
Flashing light
Automation status
lamp
UP
DOWN
AUX
ENTER
ESC
016 0 1 1 1
G1 G3
234913520
+LP-
18
RDX
Stop
-
+
24V output
Safety stop
Safety reopening
Safety
reopening
Flashing light
Automation status
lamp
CS12M Master
CS12M Slave
ZENRS
ZENPRS