Table4.4.19Multi-positionpositioningfunctionsetting
Digital Input setting
03-00~03-07
Function
02 Multi-speed/position setting command 1
03 Multi-speed/position setting command 2
04 Multi-speed/position setting command 3
05 Multi-speed/position setting command 4
46 Zero-Servo command
51 Select between speed control and position control
52 Position command enable
Zero-servo positioning function (Zero-Srvo):
When the output frequency falls below Fmin and the zero-servo input is active, the position is locked in and the
inverter enters zero-servo positioning mode (Zero-Srvo). Positioning command PosRef is origin, as shown in
gure 4.4.129.
Refer to parameter 11-49 and 11-50 for zero-servo gain and zero-servo count and parameter 20-02 and 20-03
to setup the speed regulator function.
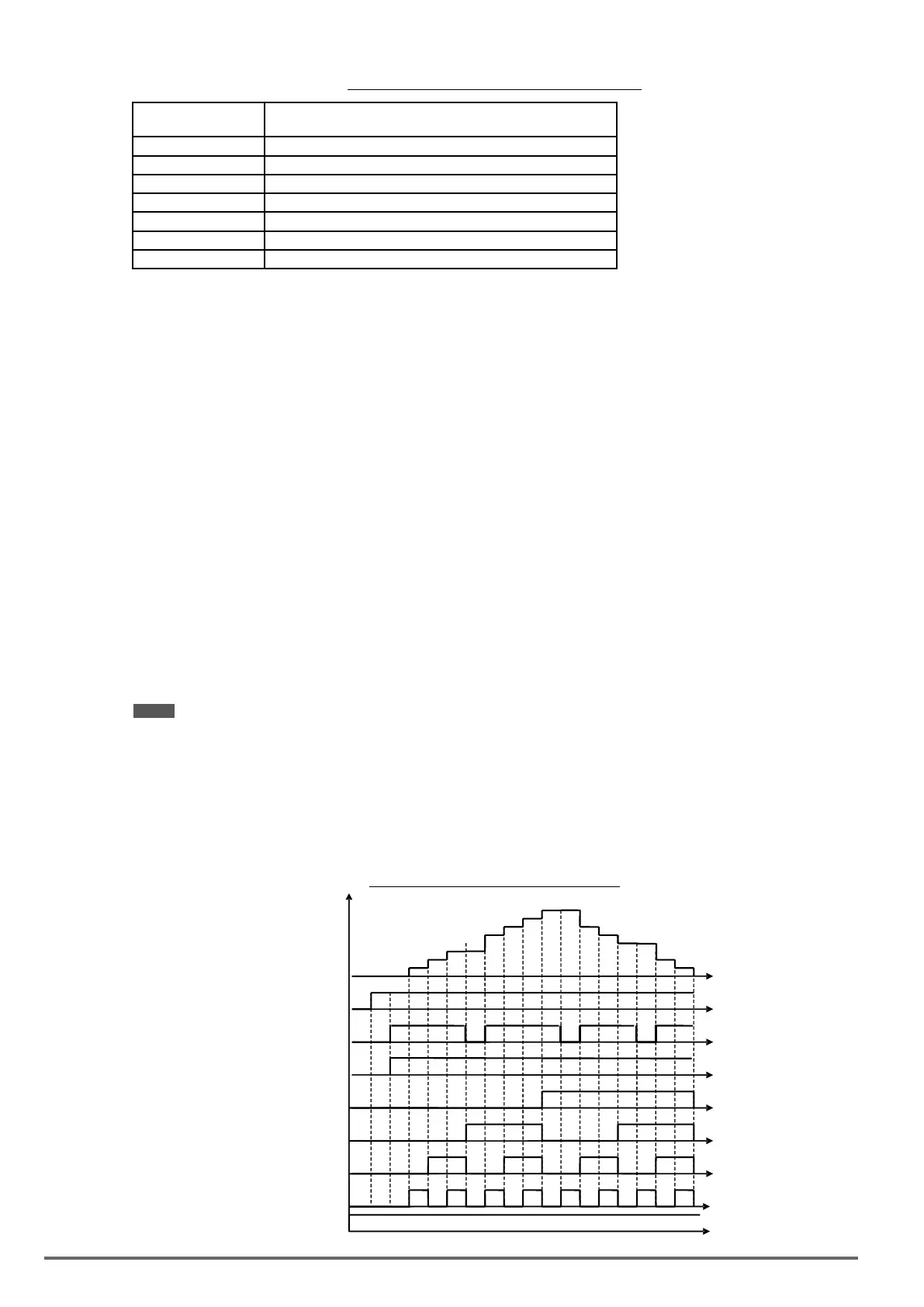
Multi-position function (MultiPosRef):
Parameter 21-42 is set to 0 and the speed is lower than the lowest frequency so the inverter will enter into the
position mode. If input multi-speed and multi-position command switch (DI is set to 51) in the zero-srvo mode,
multi-speed command 1~4 is transformed to multi-position command 1~4 and the origin of zero-srvo mode has
17-section position. Refer to Fig.4.4.130.
Spindle Positioning Function (Z-phase locked function)
Parameter 21-42 is set to 1 and the speed is lower than the lowest frequency so the inverter will enter into the
position mode when Z-phase signal appears. The origin is positioned in z phase signal and the setting value of
parameter 21-43. It can be also coupled with multi-position function.
Z phase bias value of monitoring parameter 12-78 will display the bias between Z phase and the current position.
User can rotate the motor at one cycle depending on the rotation direction. Z phase bias value of parameter
12-78 is the differential value between steering position Z point after capturing the position of Z point. Make
the value of 12-78 input the offset angle of parameter 21-43 after the position is conrmed. Then the origin is
positioned at Z phase signal + the setting value of parameter 21-43.
Note: If the motor is just at power on and does not pass the Z point, parameter 12-78 will display 9999.
Position control:
- Activate Run command (RUN)
- Activate Zero-Servo command (Zero-Srvo)
- Activate Position enable command (MultiPosEn)
- Select a position with the multi-function digital inputs (PosRef)
Refer to gure 4.4.130.
Figure4.4.130Multi-positioninglogicdiagram
Zero-Srvo
Multi Pos. Enable
Multi Pos. Switch
PosRef 0...15
S4
S3
S2
S1
Run
t
t
t
t
t
t
t
t
278 VDI100 • Instruction manual

 Loading...
Loading...







