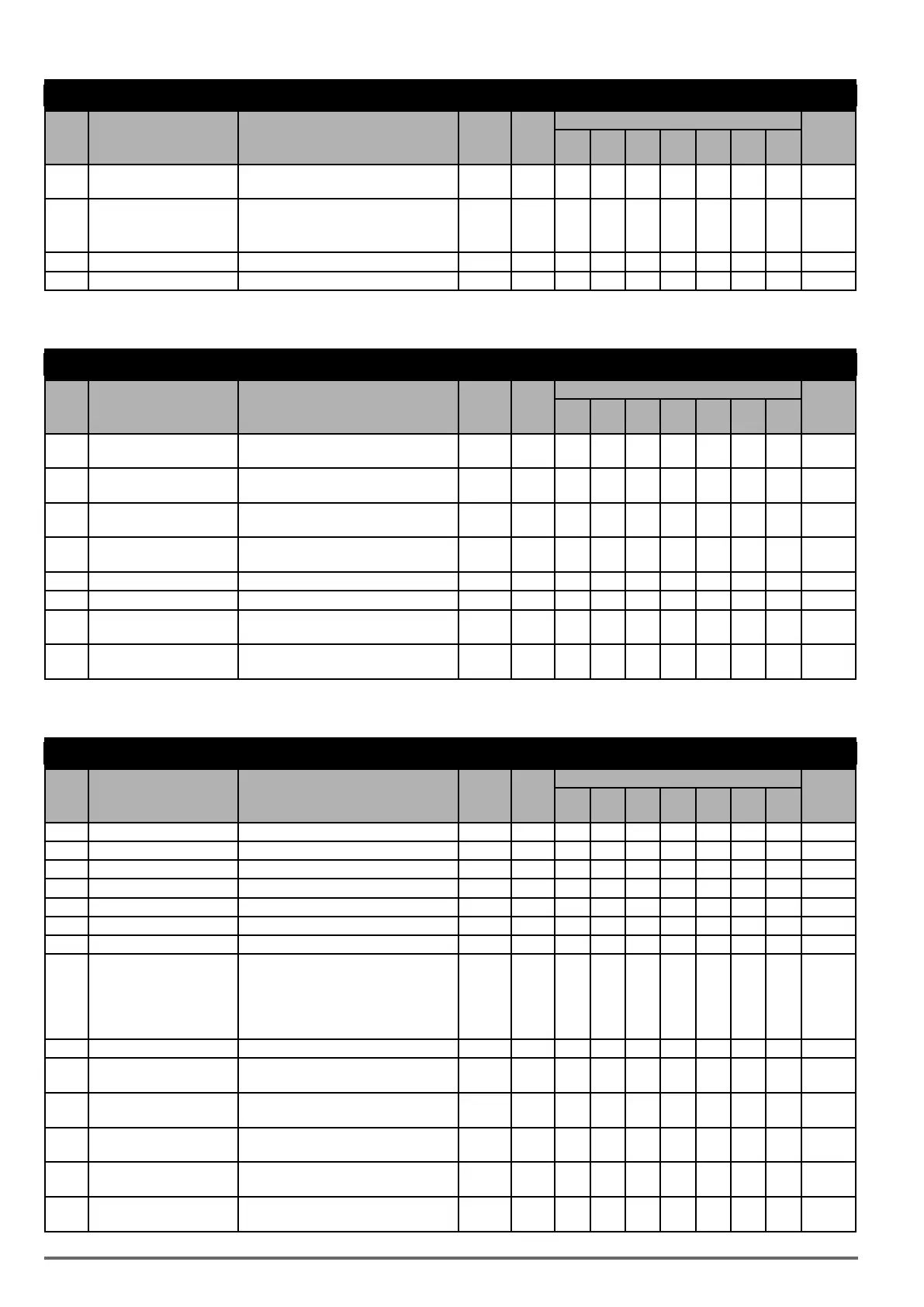
Group 18: Slip Compensation Parameters
Code Parameter Name Setting Range Default Unit
Control mode
Attribute
V/f
V/f
+PG
SLV SV
PM
SV
PM
SLV
SLV2
18-03
Slip Compensation Filter
Time
0.0~10.0 1.0 s O X X X X X X
18-04
Regenerative Slip Compen-
sation Selection
0: Disable 0 - O X X X X X X
1: Enable
18-05 FOC Delay Time 1~1000 100 ms X X O X X X X
18-06 FOC Gain 0.00~2.00 0.1 - X X O X X X X
*: Refer to the following attachment 1
Group 19: Wobble Frequency Parameters
Code Parameter Name Setting Range Default Unit
Control mode
Attribute
V/f
V/f
+PG
SLV SV
PM
SV
PM
SLV
SLV2
19-00
Center Frequency of Wob-
ble Frequency
5.00~100.00 20.00 % O O X X X X O *1
19-01
Amplitude of Wobble
Frequency
0.1~20.0 10.0 % O O X X X X O *1
19-02
Jump Frequency of Wobble
Frequency
0.0~50.0 0.0 % O O X X X X O *1
19-03
Jump Time of Wobble
Frequency
0~50 0 ms O O X X X X O *1
19-04 Wobble Frequency Cycle 0.0~1000.0 10.0 s O O X X X X O *1
19-05 Wobble Frequency Ratio 0.1~10.0 1.0 O O X X X X O *1
19-06
Upper Offset Amplitude of
Wobble Frequency
0.0~20.0 0.0 % O O X X X X O *1
19-07
Lower Offset Amplitude of
Wobble Frequency
0.0~20.0 0.0 % O O X X X X O *1
Group 20: Speed Control Parameters
Code Parameter Name Setting Range Default Unit
Control mode
Attribute
V/f
V/f
+PG
SLV SV
PM
SV
PM
SLV
SLV2
20-00 ASR Gain 1 0.00~250.00
S - X O O O O O X *1
20-01 ASR Integral Time 1 0.001~10.000
S s X O O O O O X *1
20-02 ASR Gain 2 0.00~250.00
S - X O O O O O X *1
20-03 ASR Integral Time 2 0.001~10.000
S s X O O O O O X *1
20-04 ASR Integral Time Limit 0~300 200 % X X O O O O X
20-05 ASR Positive Limit 0.1 ~ 10.0 5.0
(1)
% X O X X X X X
20-06 ASR Negative Limit 0.1 ~ 10.0 1.0
(1)
% X O X X X X X
20-07
Selection of Acceleration
and Deceleration of P/PI
0: PI speed control will be enabled only in
constant speed. For the speed accelera-
tion and deceleration, only use P control.
0 - X O O O O
X X
1: Speed control is enabled either in
acceleration or deceleration.
20-08 ASR Delay Time 0.000~0.500 0.004 s X X O O O X X
20-09
Speed Observer Proportio-
nal (P) Gain1
0.00~2.55 0.61 - X X O X X X X *1
20-10
Speed Observer Integral(I)
Time 1
0.01~10.00 0.05 s X X O X X X X *1
20-11
Speed Observer Proportio-
nal (P) Gain2
0.00~2.55 0.61 - X X O X X X X *1
20-12
Speed Observer Integral(I)
Time 2
0.01~10.00 0.06 s X X O X X X X *1
20-13
Low-pass Filter Time Con-
stant of Speed Feedback 1
1~1000 4 ms X X O X X X X
88 VDI100 • Instruction manual

 Loading...
Loading...







