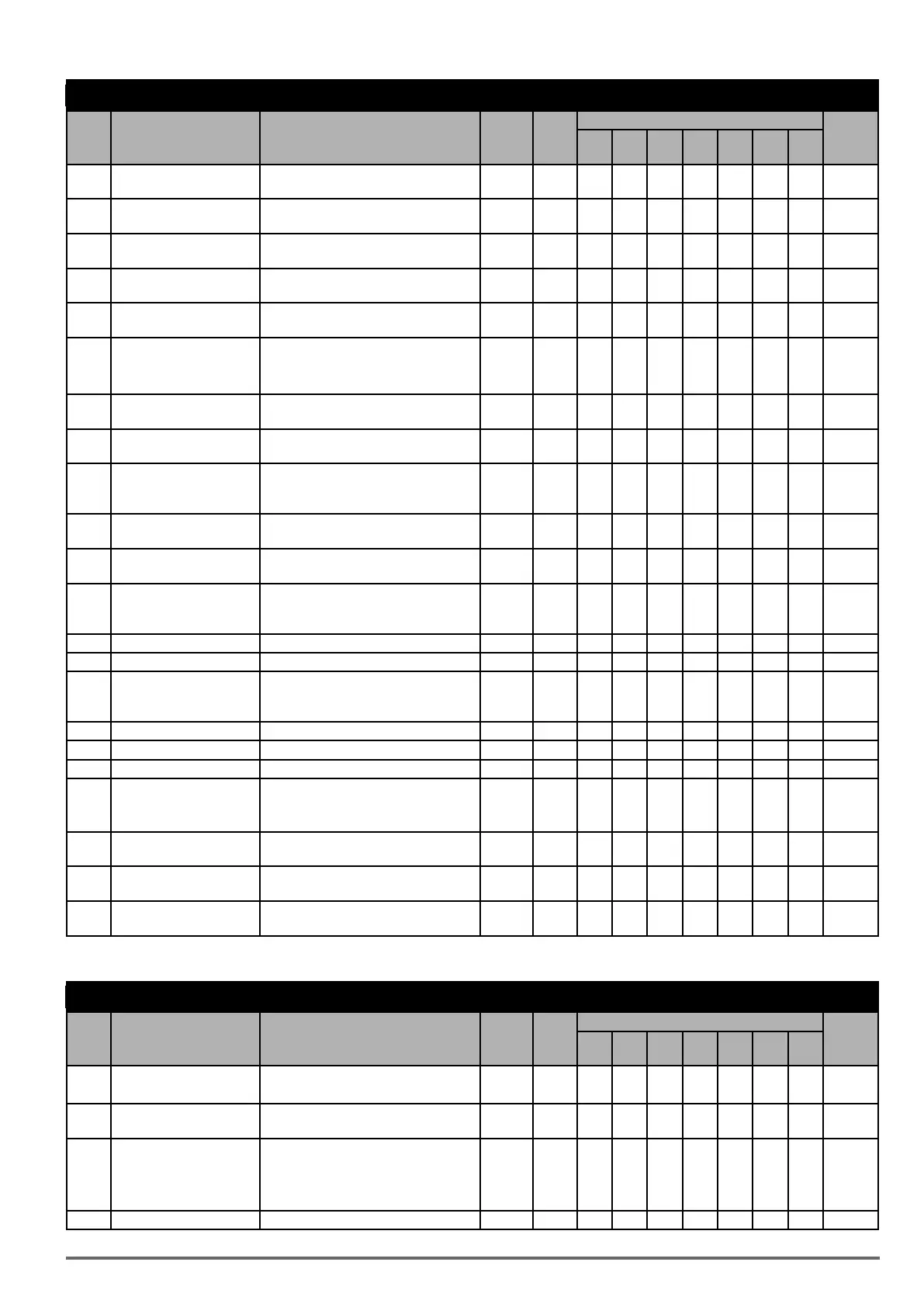
Group 20: Speed Control Parameters
Code Parameter Name Setting Range Default Unit
Control mode
Attribute
V/f
V/f
+PG
SLV SV
PM
SV
PM
SLV
SLV2
20-14
Low-pass Filter Time Con-
stant of Speed Feedback 2
1~1000 30 ms X X O X X X X
20-15
ASR Gain Change Frequen-
cy 1
0.0~599.0 4.0 Hz X O O O O X O
20-16
ASR Gain Change Frequen-
cy 2
0.0~599.0 8.0 Hz X X O O O X O
20-17
Torque Compensation Gain
at Low Speed
0.00~2.50 1.00 - X X O X X X X *1
20-18
Torque Compensation Gain
at High Speed
-10~10 0 % X X O X X X X *1
20-19 Over Speed (OS) Selection 0: Deceleration to stop 1 X O X O O X X
1: Coast to stop
2: Continue to operate
20-20
Over Speed (OS) Detection
Level
0~120 115 % X O X O O X X
20-21
Over Speed (OS) Detection
Time
0.0~2.0 0.5 s X O X O O X X
20-22
Speed Deviation (DEV)
Selection
0: Deceleration to Stop
1: Coast to Stop
2: Continue to Operate
2 X O X O O X X
20-23
Speed Deviation (DEV)
Detection Level
0~50 10 % X O X O O X X
20-24
Speed Deviation (DEV)
Detection Time
0.0~10.0 0.5 s X O X O O X X
20-25 Selection of PG Open
0: Deceleration to Stop
1: Coast to Stop
2: Continue to Operate
1 - X O X O O X X
20-26 Detection Time of PG Open 0.0~10.0 2.0 s X O X O O X X
20-27 PG Pulse Number 0~9999 1024 ppr X O X O O X X
20-28
Selection of PG Rotation
Direction
0: Forward as Counter -Clockwise
Rotation
1: Forward as Clockwise Rotation
0 - X O X O O X X
20-29 PG Pulse Dividing Ratio 001~132 1 - X O X O O X X
20-30 PG Gear Ratio 1 1~1000 1 - X O X O X X X
20-31 PG Gear Ratio 2 1~1000 1 - X O X O X X X
20-32
Selection of Specific
Encoder
0: None 0 X X X O O X X
1: Resolver
20-33
Detection Level at Constant
Speed
0.1~5.0 1.0 X O O O O O X *1
20-34
Compensation Gain of
Derating
0~25600 0 X X O O O X X *1
20-35
Compensation Time of
Derating
0~30000 100 ms X X O O O X X *1
(1) For VF+PG control mode.
Group 21: Torque And Position Control Parameters
Code Parameter Name Setting Range Default Unit
Control mode
Attribute
V/f
V/f
+PG
SLV SV
PM
SV
PM
SLV
SLV2
21-00 Torque Control Selection 0: Speed Control 0 - X X X O O X X
1: Torque Control
21-01
Filter Time of Torque
Reference
0~1000 0 ms X X X O O X X
21-02 Speed Limit Selection 0: According to AI Input 0 - X X X O O X X
1: According to the Set Value of 21-03
2: According to communication position
input (2502H)
21-03 Speed Limit Value -120~120 0 % X X X O O X X *1
VDI100 • Instruction manual 89

 Loading...
Loading...







