184 Detail program description - Helicopter mixer
Important: in normal situations, this function
should not be used if your model is fi tted with a
modern gyro system. In this context, ensure that
you comply with the instructions on adjusting your
gyro: if not, you risk making adjustments that render
your helicopter impossible to fl y. This menu has
nonetheless been retained in order to cater to a full
range of requirements and fl ying habits.
With this option, the effect of the gyro sensor
("gyro") can be varied according to the tail rotor
joystick position; this assumes the use of a gyro
system whose gyro gain can be controlled from the
transmitter via an auxiliary channel. This channel will
be channel 7 for Graupner remote control systems.
The gyro suppression function reduces gyro gain in a
linear progression as the pilot increases the tail rotor
defl ection. Without gyro suppression – i.e. when set
to 0 % – the gyro effect is constant, regardless of the
joystick position.
With a transmitter control assigned on the "Gyr7"
line on the »Control adjust« menu (page 116),
e.g. one of the proportional sliders mounted in the
middle console; as applicable, also made fl ight-phase
dependent and/or with infi nitely variable gyro effect
between minimum and maximum. In this case, gyro
gain is maximum at full defl ection of the slider, and
zero at the opposite end-point.
Of course, the software lets you limit the gyro gain
range on both sides by altering the transmitter
control travel.
Depending on the transmitter control's position, the
gyro gain at full travel on the tail rotor joystick is:
"current control position
minus
gyro suppression value".
Accordingly, if the transmitter control is at the
neutral point, and gyro suppression is set to 100 %,
the gyro gain is reduced to zero as the tail rotor
if the assigned transmitter control is moved to the
+50 % position (as shown here); and only at >150 %
suppression is gain reduced to zero with the slider
at this position, well before full tail rotor defl ection.
Exemple:
+50 %
Í Gyro gain Î
left
Stick deflection tail rotor
centre right
Range of
transmitter
control 7
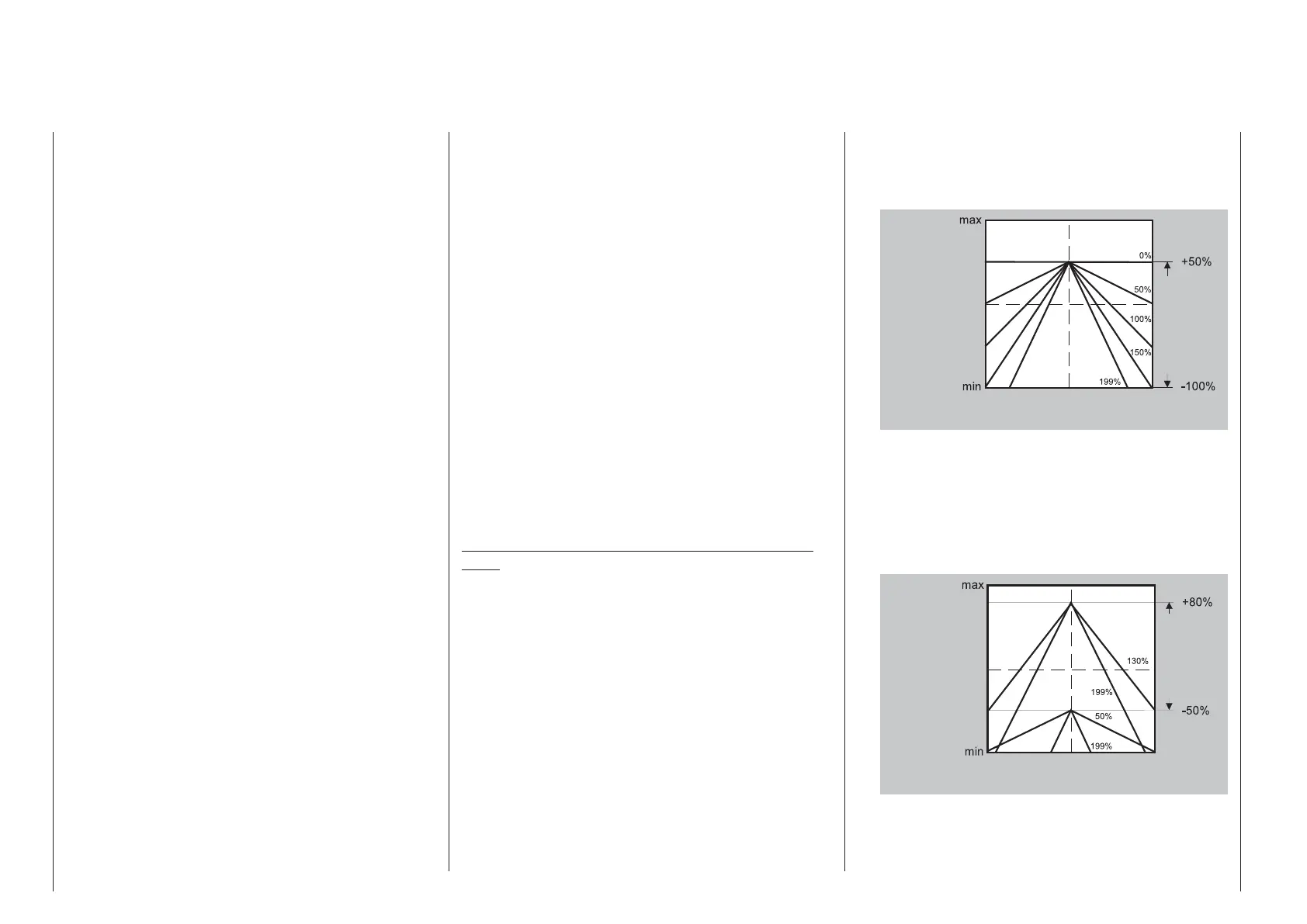
Linear gyro suppression with reduced control •
travel, e.g. -50 % to +80 % of full travel.
Gyro gain is infi nitely variable within these transmitter
control limits. Here too, for purposes of illustration,
we plot gyro gain values in relation to tail rotor
defl ection for various parameter values of gyro
suppression.
Exemple:
+80 %
Í Gyro gain Î
left
Stick deflection tail rotor
centre right
Range of
transmitter
control 7
Adjusting the gyro sensor
To achieve the maximum possible level of
stabilization for the helicopter with the gyro along the
defl ection increases. For values between 100 % and
the maximum value of 199 %, the gyro can be fully
suppressed – depending on the transmitter control
position – well before full defl ection of the tail rotor;
see the diagram on the next page.
For the Graupner/JR gyro NEJ-120 BB, order no.
3277, both the upper and the lower values are set via
rotary controls: control 1 sets the minimum gyro gain
at the bottom position of the slider; control 2 sets the
maximum gain at the top end-point of the slider; the
transition between these two values occurs roughly in
the middle of the slider travel.
In contrast, the PIEZO 900, PIEZO 2000 and
PIEZO 3000 gyro systems feature proportional,
infi nitely variable adjustment of gyro gain; see below
for typical diagrams.
As an example, the option to confi gure fl ight
phase-specifi c – and static – gyro gain gives you
the opportunity to exploit maximum stabilization for
normal, slow fl ying, but to reduce gyro gain for fast
circuits and aerobatics.
Samples of various gyro settings and confi guration
notes
Linear gyro suppression: 0 % to 199 %. •
With the tail rotor joystick in the center position,
the resulting gyro effect is set using the selected
transmitter control. Using a proportional rotary
control or slider, the effect is infi nitely variable
between zero ("min") and maximum ("max"),
provided transmitter control travel is not restricted.
With full tail rotor defl ection, the effective gyro gain
is as follows:
"current control position
minus
gyro suppression value".
This means that at 0 % gyro suppression, gyro
gain is constant for tail rotor joystick movement;
at 50 % suppression, gyro gain is reduced to half

 Loading...
Loading...






