D2 Drive User Guide v1.8 6. Drive Tuning
HIWIN Mikrosystem Corp. 189
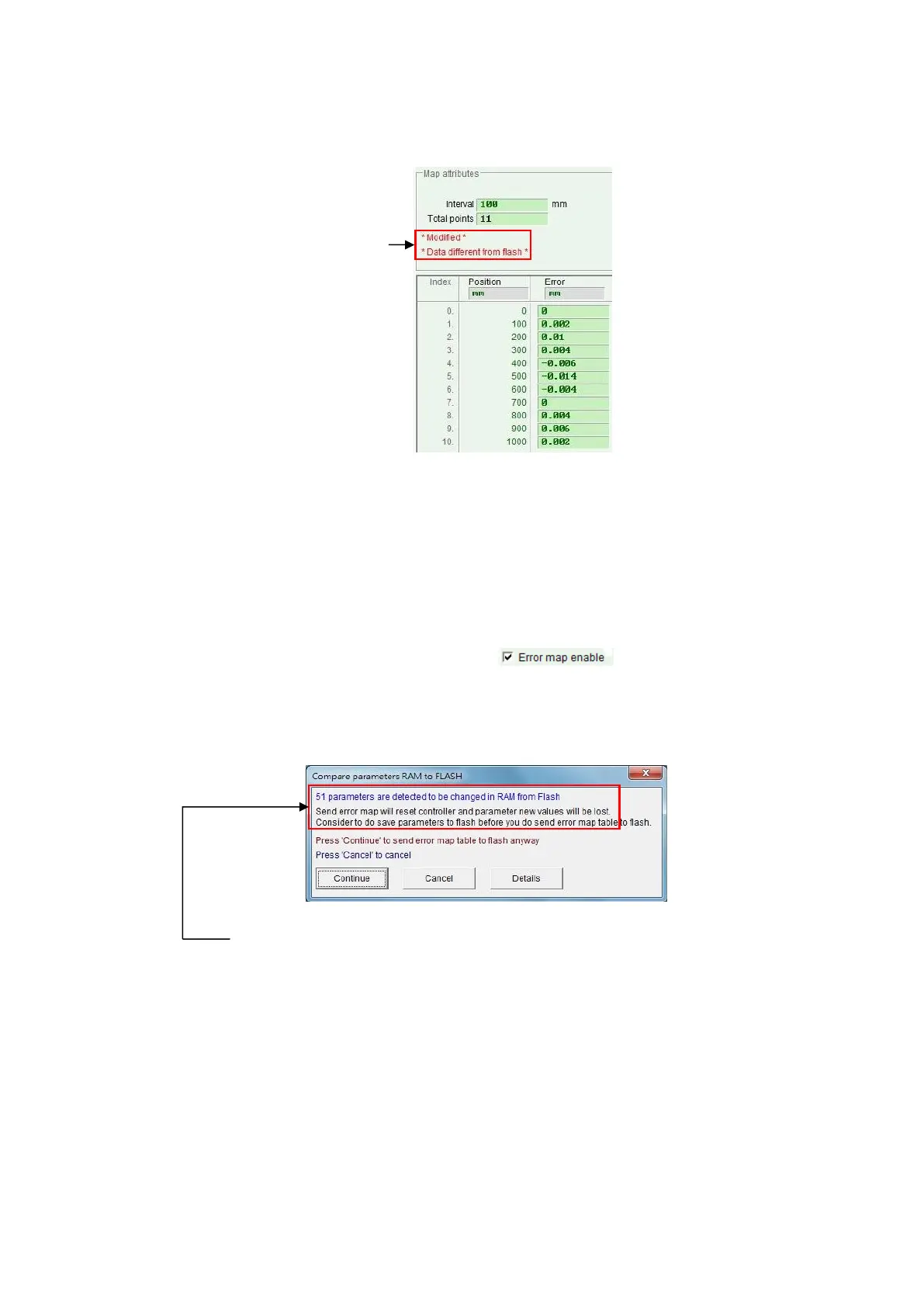
value in the “Error” field is obtained from the error measurement of laser
interferometer. For example, when the target position is 100 mm, the laser
measurement returns to 100.002 mm.
Fig. 6-61 Parameter setting of error map
Note 1. When the error compensation value is entered into the table, the entered
value is rounded to an integer multiple of encoder resolution. For example, if
the encoder resolution is 2 um and the entered compensation value is 1 um,
the program will forcibly convert it to 2 um. If the input is 0.5 um, it will be
converted to 0 um.
Note 2. Because the displayed accuracy is only to the third decimal, select the
appropriate unit for “Position” and “Error”.
Step 3. Check the option of “Error map enable” ( ).
Step 4. Choose the “Send table to flash” option of “Flash” in the function menu. If there are
other parameters modified except error map parameters, and not yet saved in Flash,
the following window will be displayed. If there is no parameter needed to save
except error map parameters, go to Step 6.
Fig. 6-62
Step 5. Click the “Cancel” button and go to the HMI main window to save servo parameters
into Flash. After servo parameters are saved, redo Step 4.
Step 6. When the “confirm” window appears, click the “Confirm” button to save error map
parameters into Flash. After erro map parameters are saved, the drive will
automatically execute the “Reset” action.
reminder to
inform that the
modified
compensation
value has not
been saved to
the drive’s
Current parameters except error map parameters are different from those
in the drive’s Flash. If click the “Continue” button to save error map
parameters to Flash, servo parameters will be lost due to the forced