Goodrive300-21 integrated machine for air compressor Function description
-65-
b. Determine integral time Ti
After proportional gain P is determined, set the initial value of integral time Ti to a large value, and
decrease Ti gradually until system oscillation occurs. Then in reverse, increase Ti until system
oscillation disappears. Record the value of Ti at this point. Set the integral time constant Ti of PID to
150%–180% of this value. This is the commissioning procedure of integral time constant Ti.
c. Determining derivative time Td
The differential time Td is generally set to 0.
If you need to set Td to another value, the setting method is similar to that for P and Ti, namely, set Td
to 30% of the value when there is no oscillation.
d. Empty system load, perform load-carrying joint debugging, and then fine-tune PID parameter until
fulfilling the requirement.
5.3.2 How to fine-tune PID
After setting the parameters controlled by PID, you can adjust these parameters by the following
means.
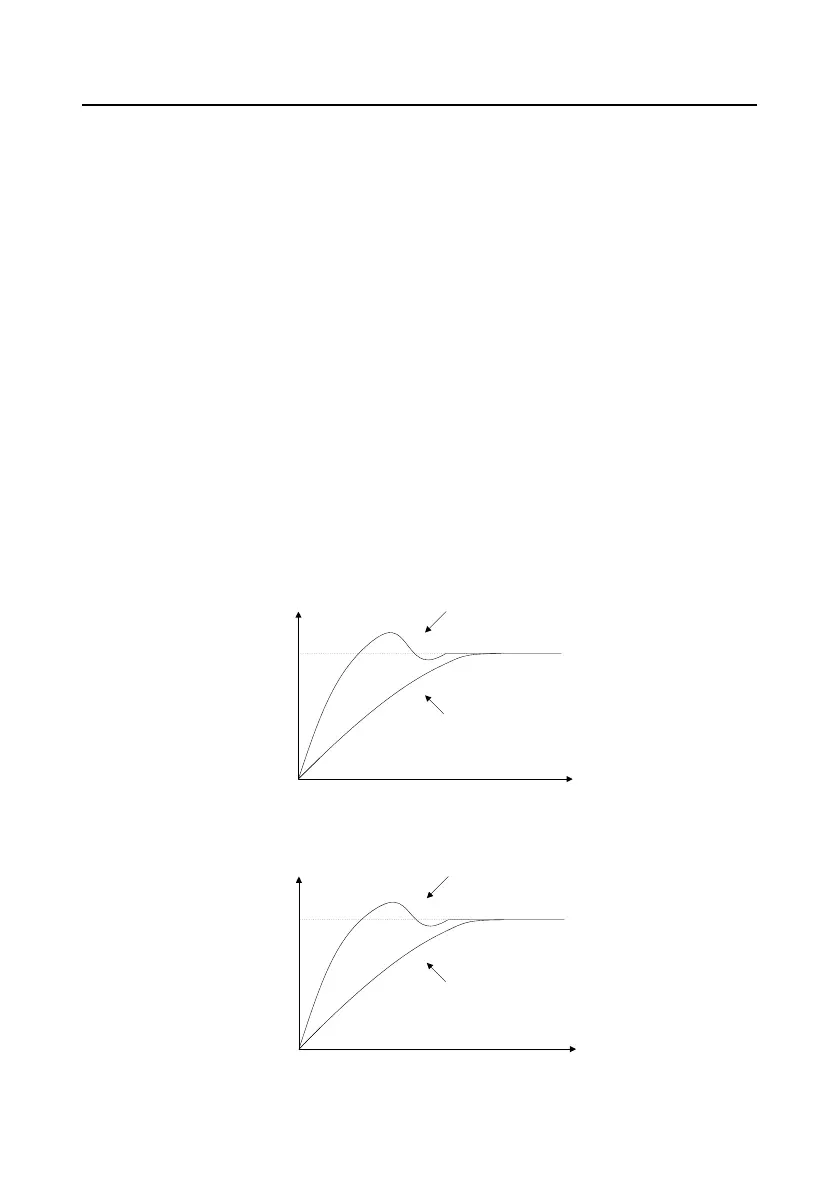
Control overshoot: When overshoot occurred, shorten the derivative time (Td) and prolong integral
time (Ti).
Before adjustment
After adjustment
Response
Time t
Stabilize the feedback value as fast as possible: When overshoot occurred, shorten integral time
(Ti) and prolong derivative time (Td) to stabilize control as fast as possible.
Before adjustment
After adjustment
Response
Time t

 Loading...
Loading...







