IPE300 series engineering VFD Function parameter list
-125-
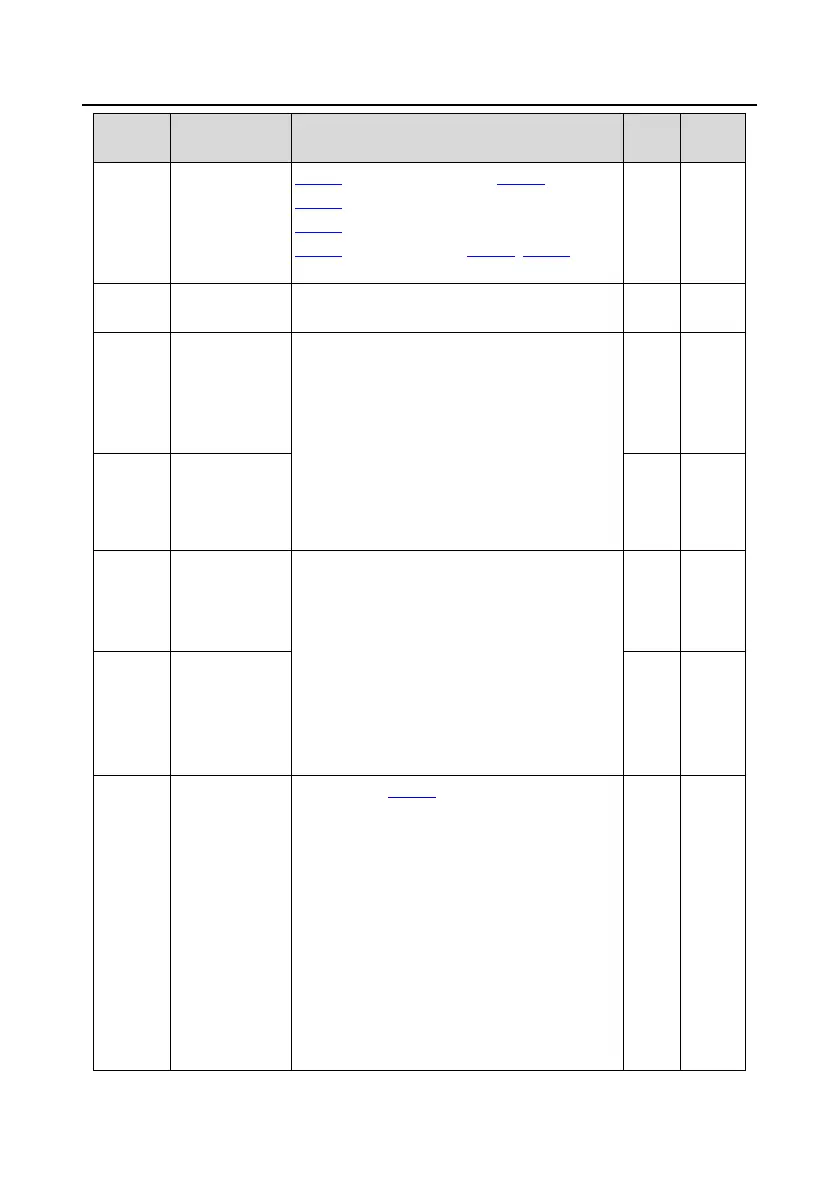
P03.02 setting range: 0.00Hz–P03.05
P03.03 setting range: 0.0–200.0
P03.04 setting range: 0.000–10.000s
P03.05 setting range: P03.02–P00.03 (Max.
output frequency)
0–8 (corresponding to 0–2
8
/10ms)
Electromotive
slip
compensation
coefficient of
vector control
Slip compensation coefficient is used to adjust
the slip frequency of the vector control and
improve the speed control accuracy of the
system. Adjusting the parameter properly can
control the speed steady-state error.
Setting range: 50–200%
Braking slip
compensation
coefficient of
vector control
Current-loop
proportional
coefficient P
Note:
1. These two parameters are used to adjust PI
parameters of current loop; it affects dynamic
response speed and control precision of the
system directly. The default value needs no
adjustment under common conditions;
2. Applicable to SVC mode 0 (P00.00=0), SVC
mode 1 (P00.00=1), and closed-loop vector
control mode (P00.00=3)
Setting range: 0–65535
Current-loop
integral
coefficient I
0–1: Keypad (P03.12)
2: AI1
3: AI2
4: AI3 (same as the above)
5: Pulse frequency HDIA
6: Multi-step torque
7: Modbus communication
8: PROFIBUS/CANopen/DeviceNet
communication
9: Ethernet communication
10: Pulse frequency HDIB
11: EtherCat/Profinet communication
12: PLC

 Loading...
Loading...




