Range, Units, Digits, Rate, and Filters 6-9
Digital filter
Digital filter types
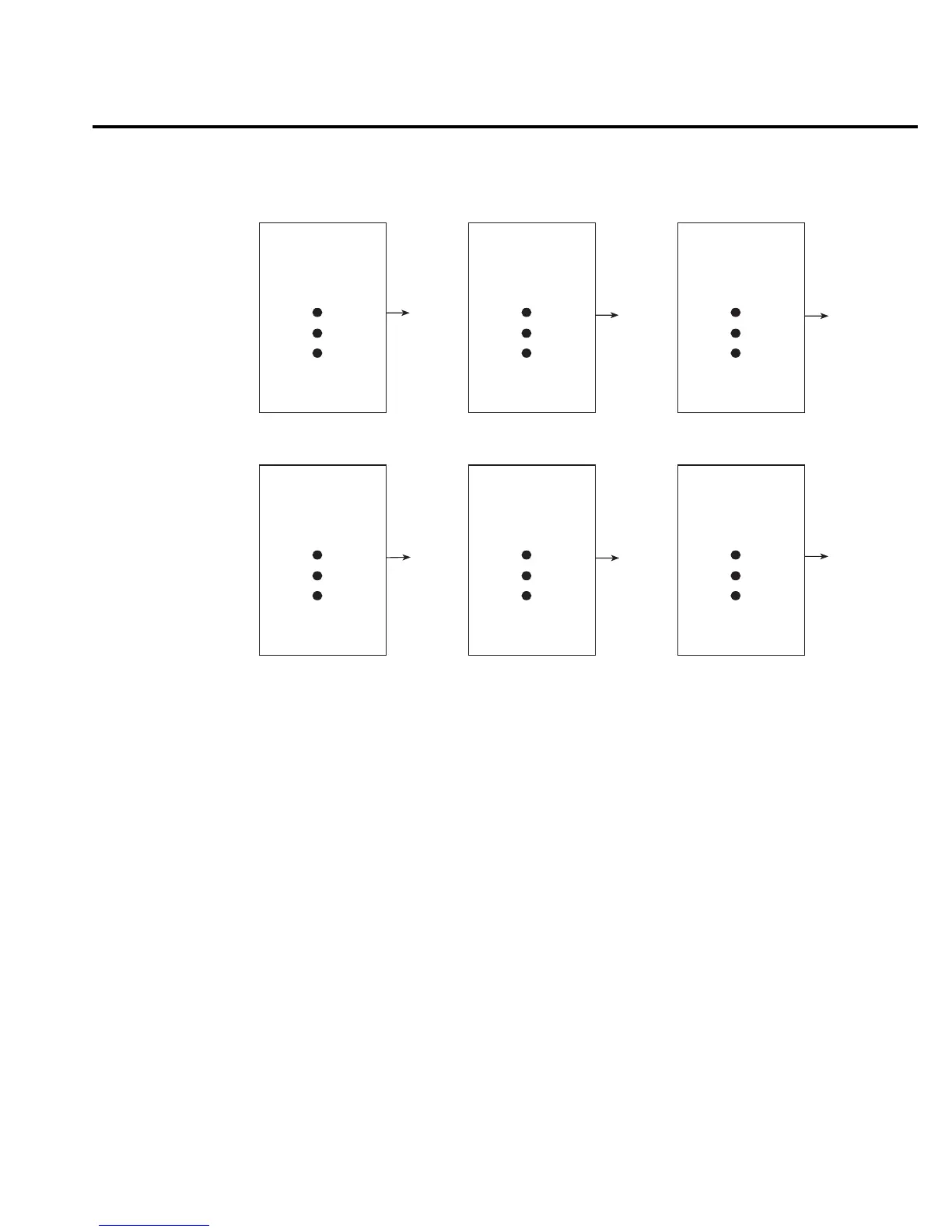
The digital filter can be either a moving or repeating type. Filter types are compared in Figure
6-2.
Moving Filter - Every time a reading conversion occurs, the readings in the stack are aver-
aged to yield a single filtered reading. The stack type is first-in, first-out. After the stack fills, the
newest reading conversion replaces the oldest. Note that the instrument does not wait for the
stack to fill before releasing readings.
Repeating Filter - Takes a selected number of reading conversions, averages them, and
yields a reading. It then flushes its stack and starts over.
Response time
The various filter parameters have the following effects on the time needed to display, store,
or output a filtered reading:
• Filter type: The time to the first reading is the same for both types, but thereafter, the
moving mode yields a faster reading than repeating mode.
• Number of reading conversions: Speed and accuracy are tradeoffs.
Conversion #10
#9
#8
#7
#6
#5
#4
#3
#2
#1
Conversion
Reading
#10
Conversion #12
#11
#10
#9
#8
#7
#6
#5
#4
#3
Conversion
Reading
#12
Conversion #11
#10
#9
#8
#7
#6
#5
#4
#3
#2
Conversion
Reading
#11
A. Class - Average, Readings = 10, Type - Moving
Conversion #10
#9
#8
#7
#6
#5
#4
#3
#2
#1
Conversion
Reading
#1
Conversion #20
#19
#18
#17
#16
#15
#14
#13
#12
#11
Conversion
Reading
#2
Conversion #30
#29
#28
#27
#26
#25
#24
#23
#22
#21
Conversion
Reading
#3
B. Class - Average, Readings = 10, Type - Repeating
Figure 6-2
Digital filter
types; moving
and repeating