2. Set d3.28 to 0. In this case, the analog – speed channel is invalid.
3. At least one external input signal DinX_Function defines Bit8 or Bit9.
For example, define Din2_Function corresponding to Din2 as 010.0, and Din3_Function corresponding
to Din3 as 020.0. In this way, the combination of the two above signals is used to choose any one of
Din_Speed0_RPM, Din_Speed1_RPM, Din_Speed2_RPM or Din_Speed3_RPM as the target speed.
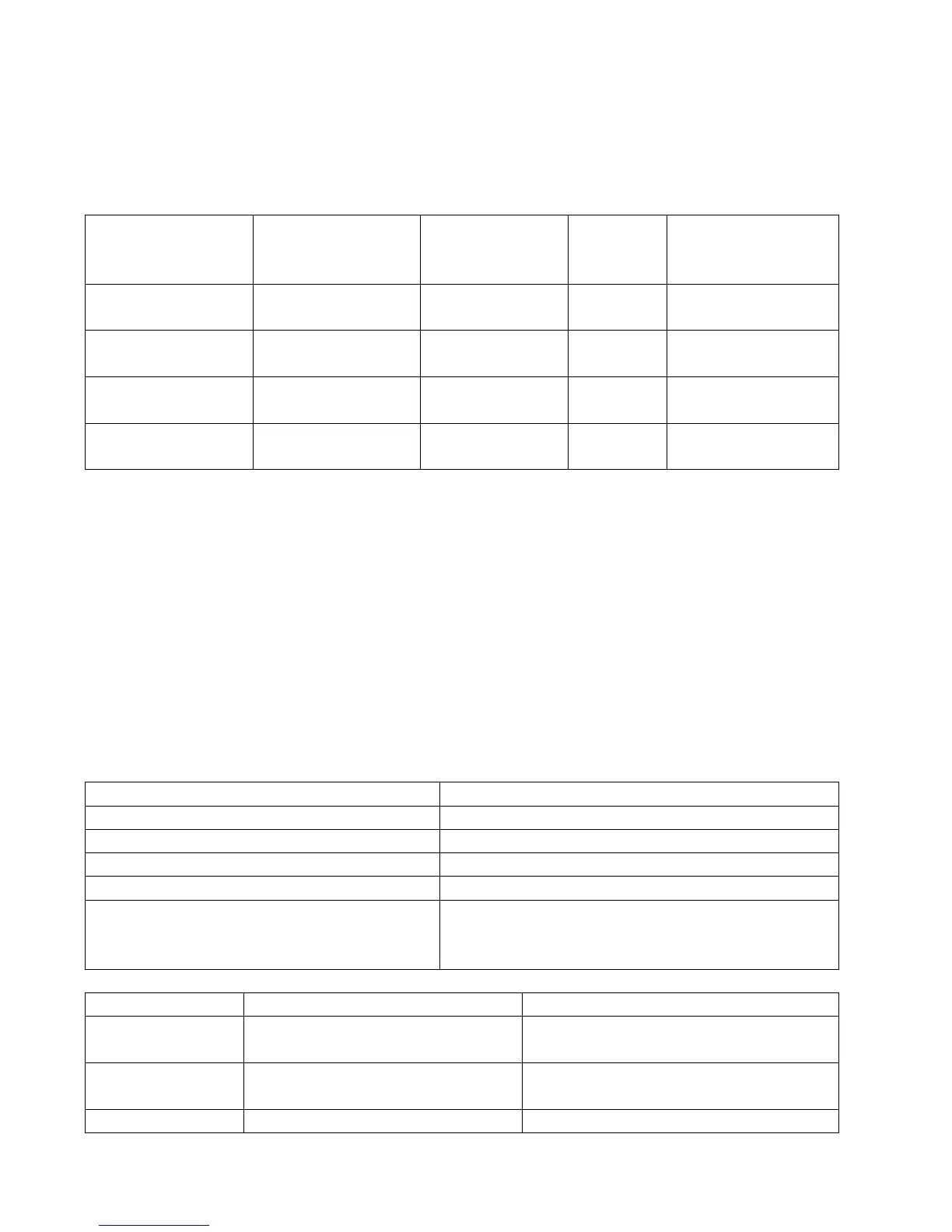
Table 7-24 Parameters for internal multi-speed control modes
Internal Speed
Control 0
(Din_Sys.Bit8)
Internal Speed
Control 1
(Din_Sys.Bit9)
Valid Object
(numeric display
operation)
Multi-speed
control: 0 [rpm]
Multi-speed control
1 [rpm]
Multi-speed control
2 [rpm]
Multi-speed control
3 [rpm]
Note: If you need to set the target speed precisely, it is required to set Din_Speed0, Din_Speed1,
Din_Speed2 and Din_Speed3 with a host computer. The four data units are internal units and are suitable for
users who are familiar with drivers. Din_SpeedX_RPM indicates the data after converting Din_SpeedX into
the unit of rpm to facilitate users. Conversion involves both the reading and writing processes, and does not
require calculation by users.
Example 7-10: Internal multi-speed control
Requirement: You need to define the digital input ports DIN6 and DIN7 as internal speed control, DIN1
as driver enabling and DIN2 as operation mode control of the driver (the mode is ―3‖ when the driver is valid,
and is ―-3‖ when the driver is invalid). For detailed requirements, see Table 7-25. For the setting method, see
Table 7-26.
Table 7-25 Requirements on internal multi-speed control
To execute the multi-step 1 speed (100 rpm)
To execute the multi-step 2 speed (200 rpm)
To execute the multi-step 3 speed (300 rpm)
To execute the multi-step 3 speed (400 rpm)
To enable the driver, and lock the motor shaft
To control operation modes of the driver (the mode is ―3‖
when the driver is valid, and is ―-3‖ when the driver is
invalid)
Table 7-26 Setting methods for internal multi-speed control
Set to 000.1
(Driver enable)
Set to 000.4
(control over operation modes of drivers)