47
UserManualforELD2Servo
Encoder measuring
circuit damaged
/ replace the driver with a new one
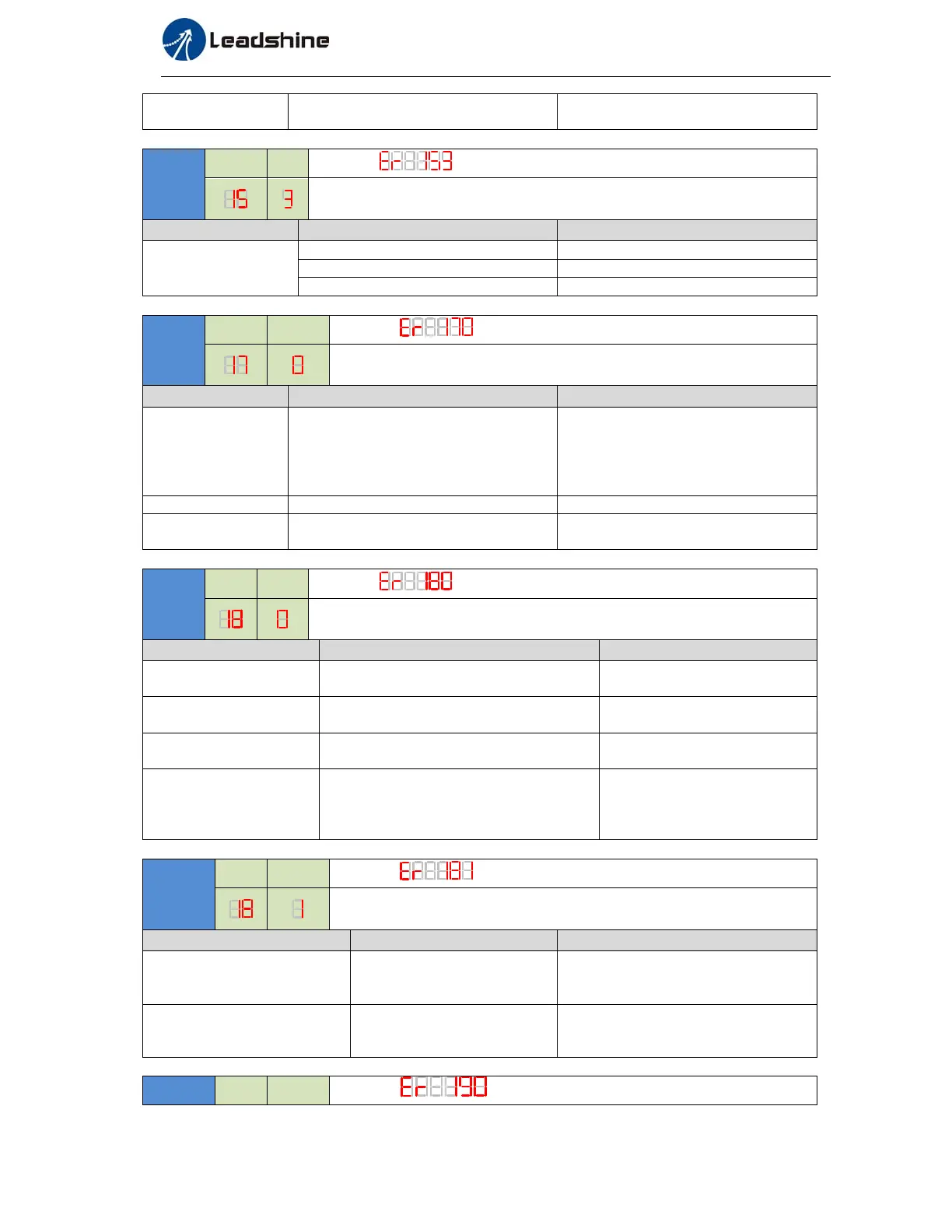
Error
code
Main
Extr
Display:“ ”
Content:Multiple turn absolute value encoder battery error
Cause Confirmation Solution
Encoder battery error
Check the battery Replace battery
Check the motor Replace moto
Reset the driver alarm Reset the driver alarm
Error
code
Main Extra
Display:“
”
Content:encoderdataerror
Cause Confirmation Solution
Communication data
abnormal
Check encoder power voltage if it is
DC5V
5% or not ; check encoder cable
and shielded line if it is damaged or not;
check encoder cable whether it is
intertwined with other power wire or not
Ensure power voltage of encoder
normally, ensure encoder cable and
shielded line well with FG ground,
ensure encoder cable separated with
other power wire
Encoder damaged / replace the motor with a new one
Encoder measuring
circuit damaged
/ replace the driver with a new one
Error
code
Main Extra
Display:“
”
Content:positionerrorover‐largeerror
Cause Confirmation Solution
Unreasonable set of
position error parameter
Check parameter PA_014 value if it is too
small or not
Enlarge the value of PA_014
Gain set is too small
Check parameter PA_100, PA_105 value
if it is too small or not
Enlarge the value of PA_100,
PA_105
Torque limit is too small
Check parameter PA_013, PA_522 value
whether too small or not
Enlarge the value of PA_103,
PA_522
Outside load is too large
Check acceleration/ deceleration time if it
is too small or not , check motor rotational
speed if it is too big or not ; check load if
it is too large or not
Increase acceleration/
deceleration time decrease
speed, decrease load
Error
code
Main Extra
Display:“
”
Content:velocityerrorover ‐largeerror
Cause Confirmation Solution
The deviation of inner position
command velocity is too large
with actual speed
Check the value of PA_602 if
it is too small or not
Enlarge the value of PA_602, or set the
value to 0, make position deviation
over-large detection invalid
The acceleration/ decelerate
time Inner position command
velocity is too small
Check the value of PA_312,
PA_313 if it is too small or not
Enlarge the value of PA_312, PA_313.
adjust gain of velocity control, improve
trace performance.
Error
Main Extra
Display:“
”