48
UserManualforELD2Servo
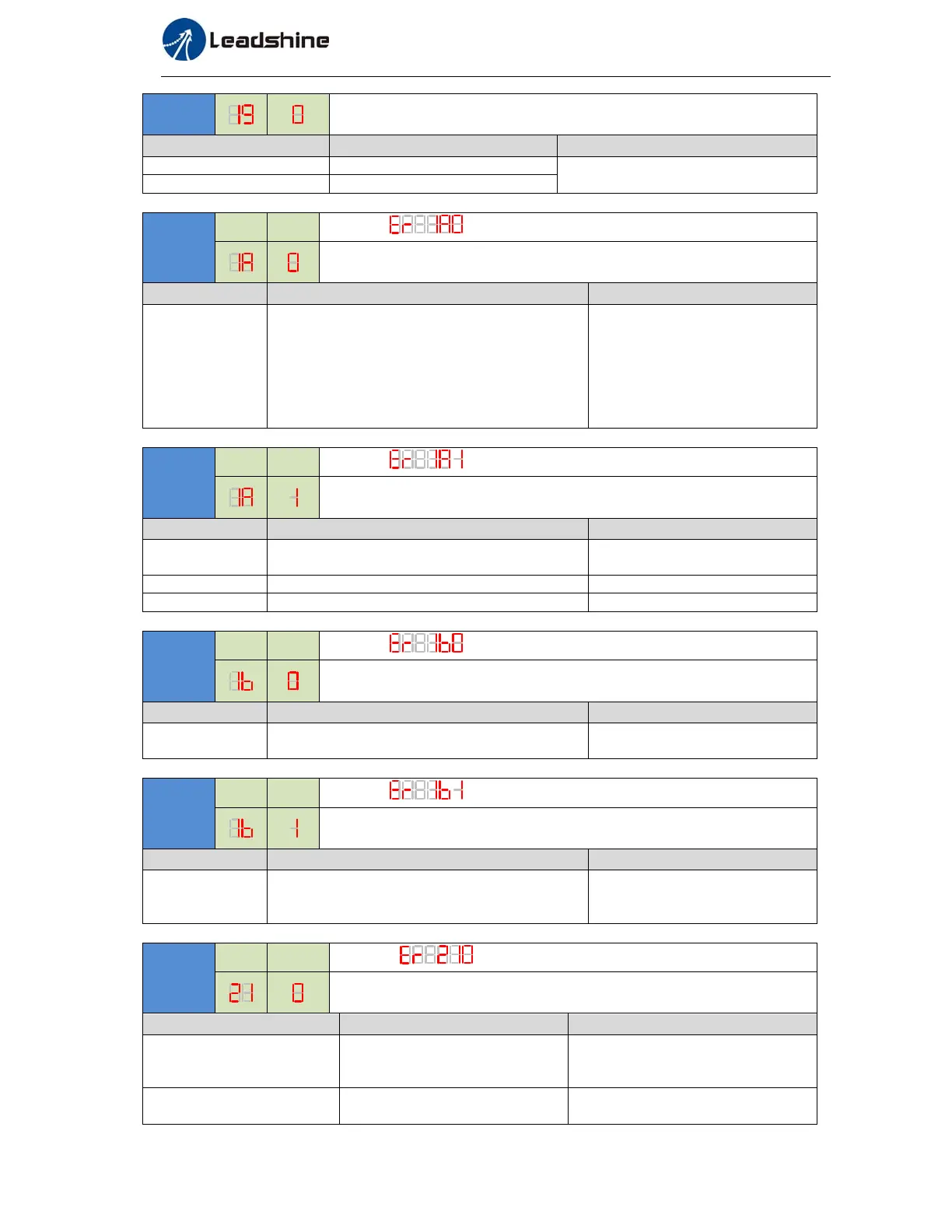
code
Content:excessive vibration
Cause Confirmation Solution
Current vibration Current vibration Cut down the value of Pr003. Pr004
Stiffness is too strong Stiffness is too strong
Error
code
Main Extra
Display:“
”
Content:over‐speed1
Cause Confirmation Solution
Motor speed has
exceeded the first
speed limit
(PA_321)
Check speed command if it is too large or not;
check the voltage of analog speed command if it
is too large or not; check the value of PA_321 if
it is too small or not; check input frequency and
division frequency coefficient of command pulse
if it is proper or not; check encoder if the wiring
is correct or not
Adjust the value of input speed
command, enlarge the value
PA_321 value, modify command
pulse input frequency and
division frequency coefficient,
assure encoder wiring correctly
Error
code
Main Extra
Display:“
”
Content:Motor speed out of control
Cause Confirmation Solution
UVW connection
error
UVW connection error
Encoder error Encoder error Replace moto
S
ecial function Set Pr1.37=4
Error
code
Main Extra
Display:“
”
Content:Wrong pulse input frequency
Cause Confirmation Solution
Wrong pulse
input frequency
Error
code
Main Extra
Display:“
”
Content:Electronic gear ratio error
Cause Confirmation Solution
Pulse input
frequency is too
high
Pulse input frequency is too high Make sure the pulse frequency is
blew 500K
Error
code
Main Extra
Display:“
”
Content:I/Finputinterfaceallocationerror
Cause Confirmation Solution
The input signal are assigned
with two or more functions.
Check the value of PA_400,
PA_401, PA_402,PA_403,PA_404
if it is
roper or not
Assure the value of PA_400, PA_401,
PA_402, PA_403, PA_404 set
correctly
The input signal aren’t
assigned with any functions.
Check the value of PA_400,
PA_401,PA_402,PA_403,PA_404
Assure parameter PA_400, PA_401,
PA_402,PA_403,PA_404 set