Parameter setting with the XT EMZ9371BC keypad
Menu structure
9
Parameter setting
9.4
9.4.8
L
9.4-13
EDS82EV903-1.0-11/2002
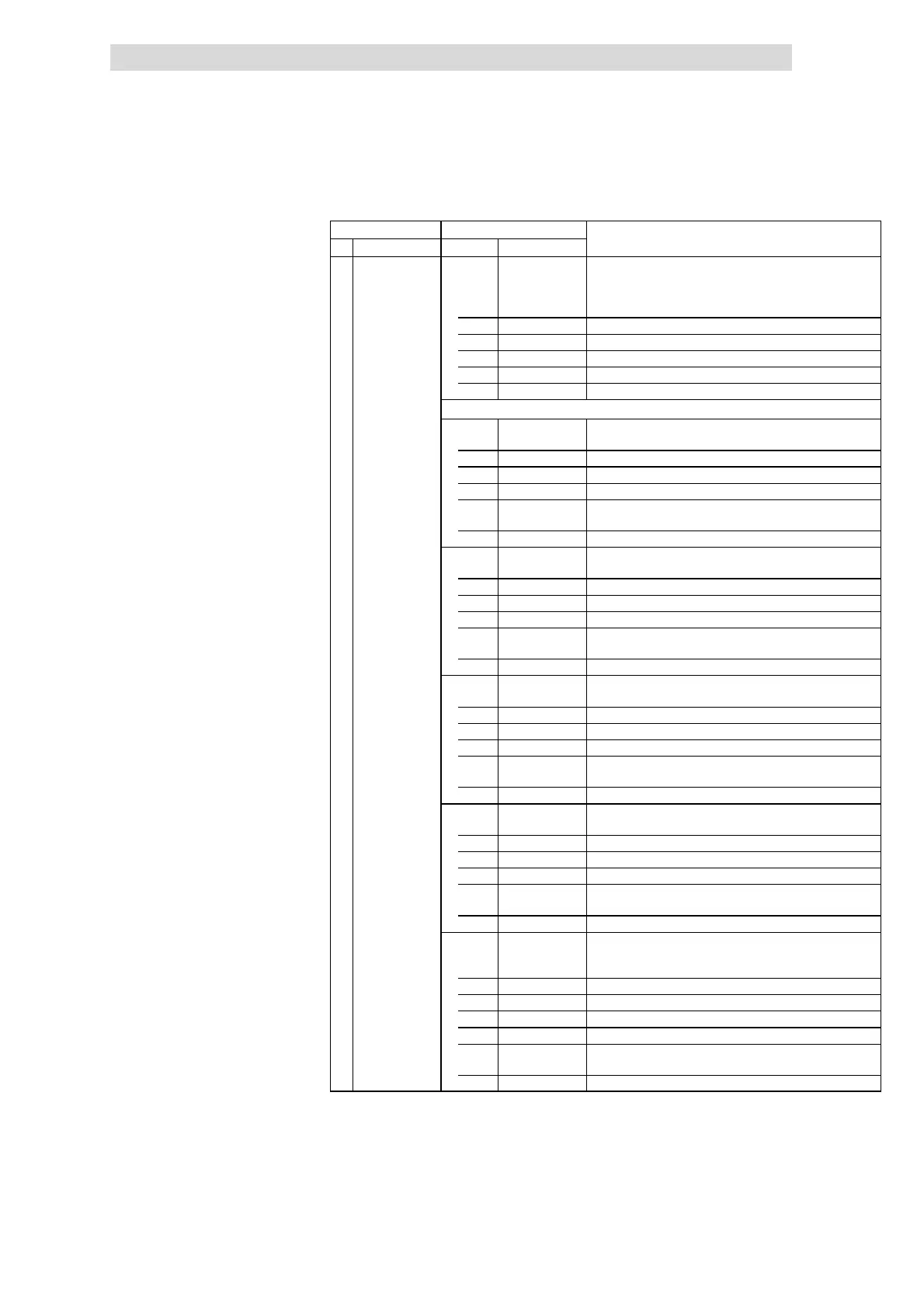
Main menu DescriptionSubmenus
No.
Description
DisplayNo.Display
5.21 Torque-Ctrl 7 Operation with fieldbus function module on FIF (DRIVECOM
control)
Torque setpoint via process data channel
Speed limitation via process data channel
5.21.1 FIF managem Set up fieldbus communication
5.21.2 Torque setpt Torque setpoint configuration
5.21.3 f limit Speed limitation configuration
5.21.4 Motor param Motor current control, motor monitoring configuration
5.21.5 Motor ident Motor parameter identification
Process control with PID controller in the operating mode ”U/f characteristic control”
5.22 PID-Ctrl 0 Setpoint via parame ter channel (C0181)
Analog actual value via analog input 1 (AIN1)
5.22.1 Setpoint Setpoint configuration
5.22.2 Actual value Configuration act. value
5.22.3 PCTRL setup Process controller configuration
5.22.4 f limit/ramp Output frequency, acceleration time, deceleration time
configuration
5.22.5 Motor param Motor current control, motor monitoring configuration
5.23 PID-Ctrl 1 Setpoint via parame ter channel (C0138)
Analog actual value via analog input 1 (AIN1)
5.23.1 Setpoint Setpoint configuration
5.23.2 Actual value Configuration act. value
5.23.3 PCTRL setup Process controller configuration
5.23.4 f limit/ramp Output frequency, acceleration time, deceleration time
configuration
5.23.5 Motor param Motor current control, motor monitoring configuration
5.24 PID-Ctrl 2 Analog setpoint via analog input 1 (AIN1)
Analog actual value via analog input 2 (AIN2)
5.24.1 Setpoint Setpoint configuration
5.24.2 Actual value Configuration act. value
5.24.3 PCTRL setup Process controller configuration
5.24.4 f limit/ramp Output frequency, acceleration time, deceleration time
configuration
5.24.5 Motor param Motor current control, motor monitoring configuration
5.25 PID-Ctrl 3 Setpoint via AIF process data channel (AIF-IN.W1)
Analog actual value via analog input 1 (AIN1)
5.25.1 Setpoint Setpoint configuration
5.25.2 Actual value Configuration act. value
5.25.3 PCTRL setup Process controller configuration
5.25.4 f limit/ramp Output frequency, acceleration time, deceleration time
configuration
5.25.5 Motor param Motor current control, motor monitoring configuration
5.26 PID-Ctrl 5 Operation with function module system bus (CAN) on FIF
Setpoint via process data channel (CAN-IN1.W2)
Actual value via process data channel (CAN-IN1.W3)
5.26.1 CAN managem Set up system bus (CAN) communication
5.26.2 Setpoint Setpoint configuration
5.26.3 Actual value Configuration act. value
5.26.4 PCTRL setup Process controller configuration
5.26.5 f limit/ramp Output frequency, acceleration time, deceleration time
configuration
5.26.6 Motor param Motor current control, motor monitoring configuration