■■■■■■■■■■■■■■■■■■■■■■
3 Installation
855 Robotic Titrosampler
■■■■■■■■
19
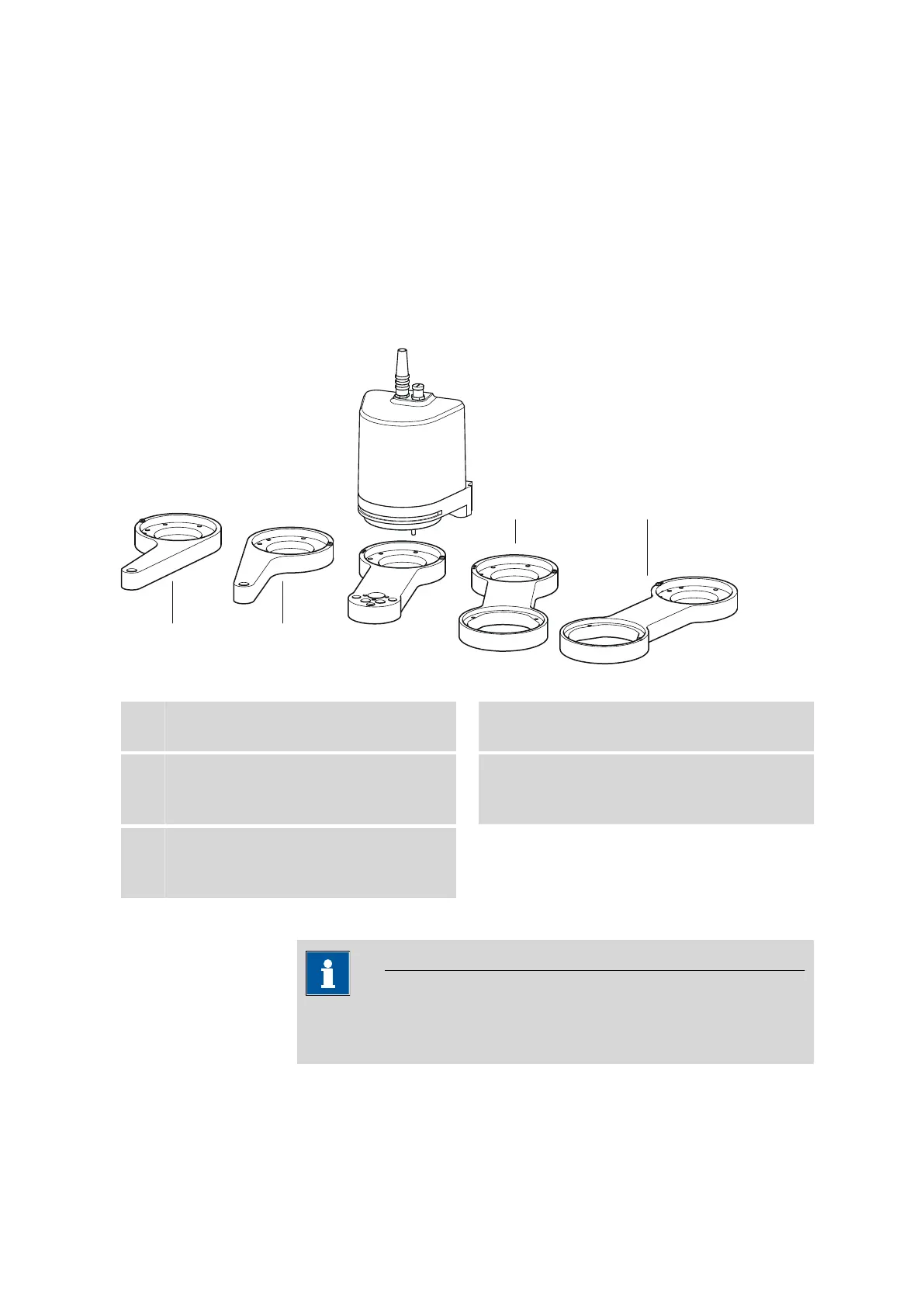
3.5 Configuring the robotic arm
A variety of differently constructed robotic arms is available for enabling a
wide range of applications. They differ from one another in their geomet-
ric sizes, e.g. swing radius or maximum permissible swing angle. The con-
figuration data must be entered in the Sample Processor or in the control
software prior to the assembly of the robotic arm. The data required
is engraved on the underside of the robotic arm. Examples of the most
common robotic arms are shown in the illustration below.
Figure 9
Robotic arms - standard model versions:
1
Transfer robotic arm (6.1462.030)
For sample transfer, left-swinging.
2
Transfer robotic arm (6.1462.040)
For sample transfer, right-swinging.
3
Titration robotic arm (6.1462.050)
With titration head, left-/right-swinging *).
4
Macro robotic arm (6.1462.060)
With holder for a 6.1458.XXX titration head
insert, left-swinging.
5
Macro robotic arm (6.1462.070)
With holder for a 6.1458.XXX titration head
insert, right-swinging.
*) can be mounted in two ways
NOTICE
A detailed list of the available robotic arms, along with the necessary
configuration data, can be found in Chapter Robotic arms, page 51ff.