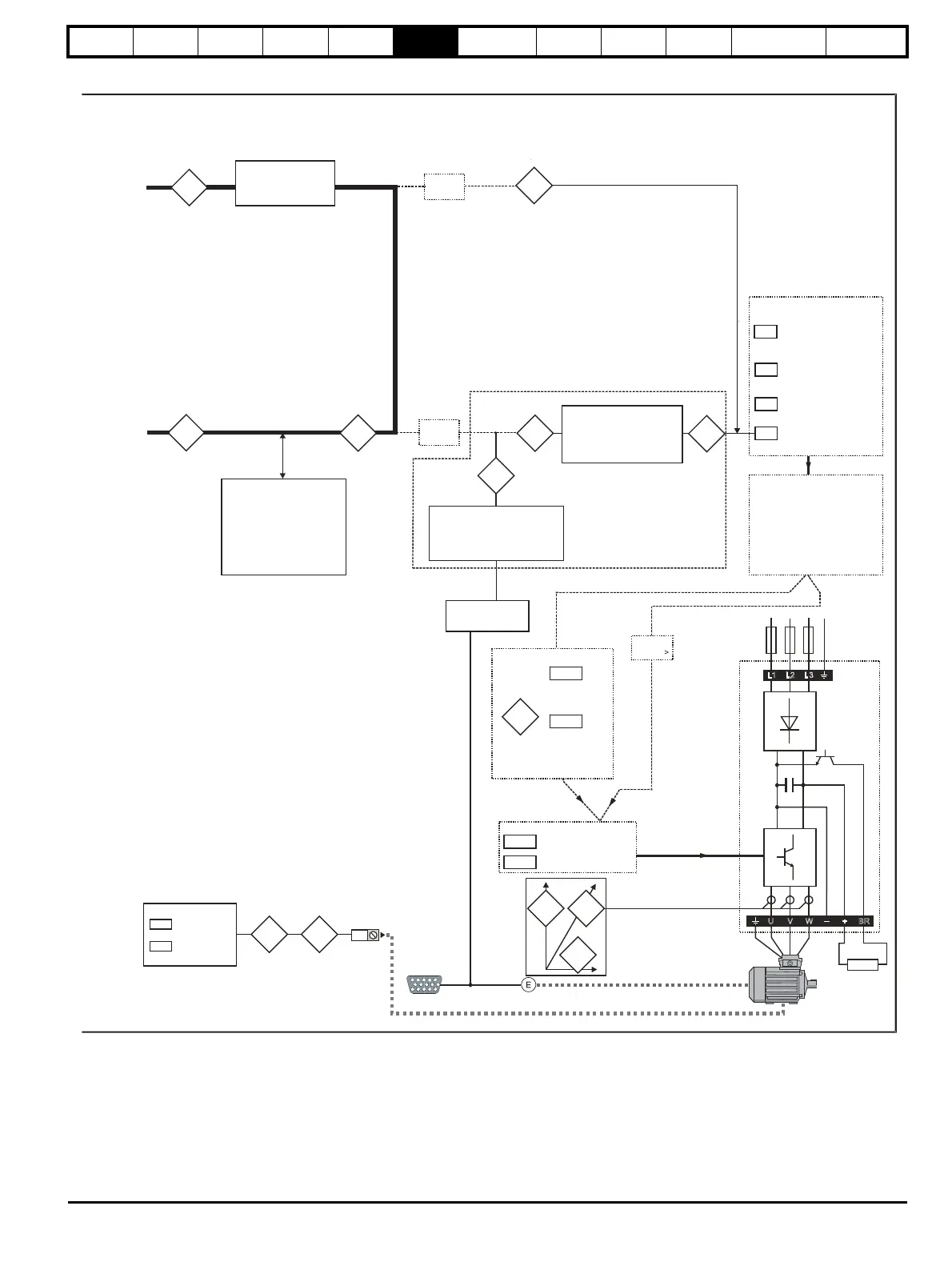
Motor
control
B25
A24
15 way sub-D
connector
Symmetrical
Current Limit
A20 Number Of Motor Poles
B04 Motor Rated Power Factor
A19 Motor Rated Voltage
A22 Motor Rated Speed
A18 Motor Rated Current
A21 Motor Rated Frequency
B20 Motor Rated Thermal
Time Constant 1
Motor
parameters
_
+
L1 L2 L3
_
+
U V W
Resistor
(optional)
Drive
A51
+ BR
_
Power stage
Open Loop
Control Mode
B09
Low Frequency
Voltage Boost
B12
OL>
Motor-voltage control
Calculated
Nominal
Motor
Speed
A25
A08
Maximum Switching
Frequency
Output Frequency
Torque
Producing
Current
Total Output
Current
Magnetizing
Current
RFC-A,
RFC-S
J37
J24
A04
J32
J39J09
Speed loopgains
A49 Start speed loop P gain
A50 Start speed loop I gain
A52 Run speed loop P gain
A53 Run speed loop I gain
Speed loop
error
Start current
loop filter
Run current
loop filter
Profile
RFC-A
RFC-S>
speed
Analog
speed reference
Reference
parameter
selected
Drive encoder
speed feedback
Speed
loop
output
J51
Profile generation
A40 Acceleration rate
A41 Deceleration rate
A35 Run Jerk 1
A36 Run Jerk 2
A37 Run Jerk 3
A38 Run Jerk 4
A42 Creep stop deceleration
A39 Creep stop jerk
A12 Encoder type
A13 Encoder auto configuration
A14 Encoder LPR
A15 Encoder power supply
A17 Encoder feedback invert
RFC-A, RFC-S
G51
J60
Output
frequency
Profile generation
Carried out by Elevator
controller in analog
reference mode
OL>
A54
J25
Digital
I02 State
Brake
Control
Output
Brake Control
A47
Brake
Release Delay
A48
Brake
Apply Delay
T25
D03
F02
J31
Analog
Digital
RFC-A
> Motor Parameter
Adaptive Control
C09 Drive Encoder
Feedback Filter

 Loading...
Loading...



